[VLA] VLA-Adapter: An Effective Paradigm for Tiny-Scale Vision-Language-Action Model
[VLA] VLA-Adapter: An Effective Paradigm for Tiny-Scale Vision-Language-Action Model
- Paper: https://arxiv.org/pdf/2509.09372
- github: https://vla-adapter.github.io/
- archived (인용수: 0회, 25-09-17 기준)
- downstream task: Robot Simulation Benchmark (Vision + Language + Action)
1. Motivation
-
최근 Vision-Langauge 모델로 Action space (Policy model)와 align하기 위한 연구가 많이 진행되고 있다.
-
대부분이 Robotic data (V-L-A paired) 로 pretrain을 요구하여 training cost가 많이 든다.
$\to$ training cost를 줄일수 있는 방안을 제안해보자!
2. Contribution
-
Vision-Langauge space (VLM) & Action space (Policy)간의 bridging paradigm 효과를 분석한 최초의 논문
-
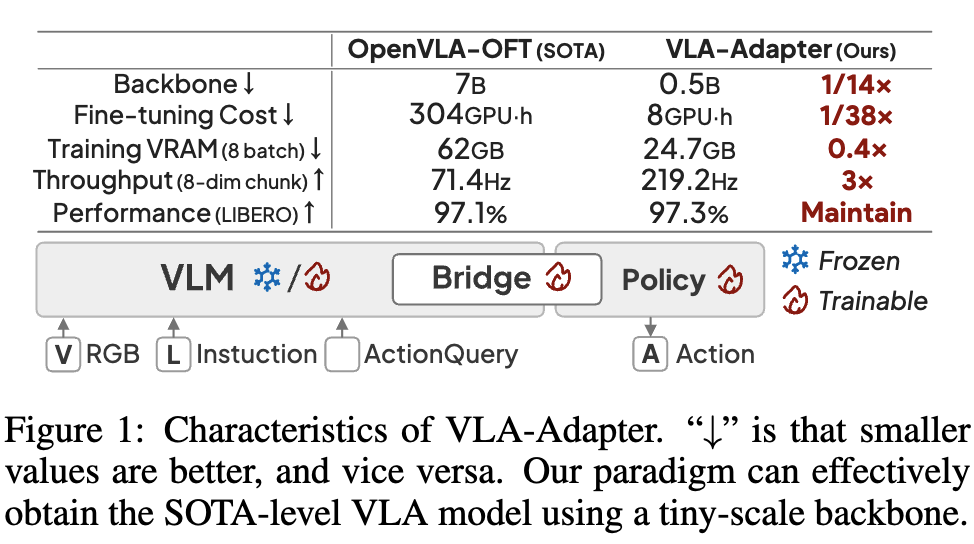
충분한 멀티모달 정보를 Action model (Policy Network)에 제공하여 VL & A의 간극을 줄여주는 VLA-Adapter를 제안
-
작은 규모의 parameter로 높은 성능(success-rate), 낮은 학습 비용, 빠른 추론 속도을 나타냄
3. Related Works
-
Vision-Langauge-Action (VLA) Models
- 주로 robot을 instruction으로 제어하기 위해 action의 sequence (trajectory)로 구성된 task
- Single System: 해당 task용 Policy Network를 pretraining해야함
- Dual System: VLM + Action 모델의 조합이 등장함. Latency issue 존재
- 주로 robot을 instruction으로 제어하기 위해 action의 sequence (trajectory)로 구성된 task
-
Bridging from Perception to Action space
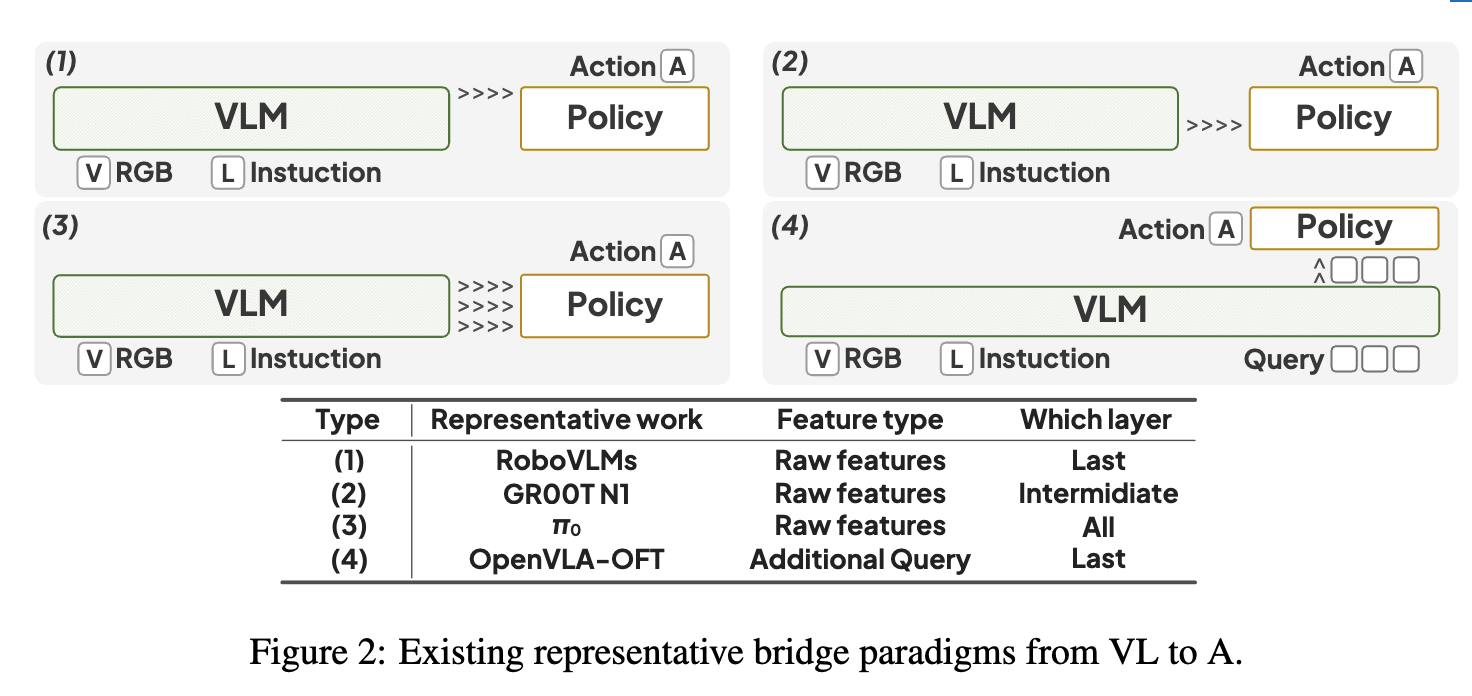
- VLM의 raw feature 사용
- Action 전용 Learnable Query 사용
4. VLA-Adapter
Overall framework

-
3-a, 3-b $\to$ Single Layer
-
3-c, 3-d $\to$ All-layer
-
VLM (Qwen2.5-0.5B / LLaMA2-7B / OpenVLA-7B)
-
Input
- $X_t^v$: t step에서 3rd-view image
- $X_t^g$: t step에서 gripper image
- $L_t$: t step에서 instruction
- $AQ_t$: t step에서 Action Query
-
Output
- $C_t^R$: Raw latent
- $C_t^{AQ}$: ActionQuery latent
-
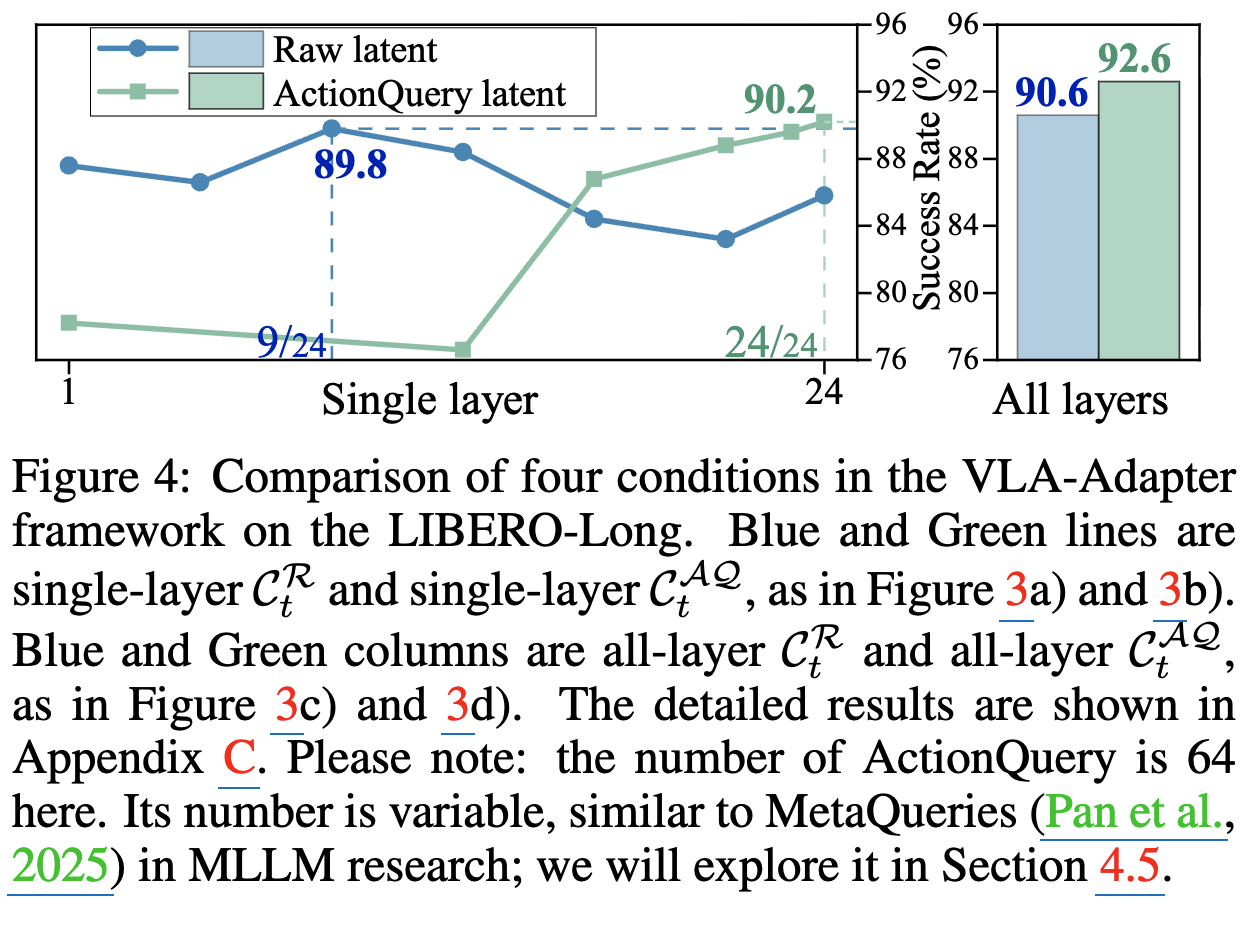
어떤 VL의 latent가 Action Policy model이 예측하는데 가장 도움이 될까?
-
$C_t^R$: Middle-layer가 action 예측에 필요한 VL embedding을 많이 보유
-
$C_t^{AQ}$: Final layer가 action 예측에 필요한 VL embedding을 많이 보유
-
Multi-layer feature를 넣는것이 Single alyer feature를 넣는 것보다 우수함
-
ActionQuery latent가 항상 Raw latent보다 우수한가? $\to$ task마다 다르다.

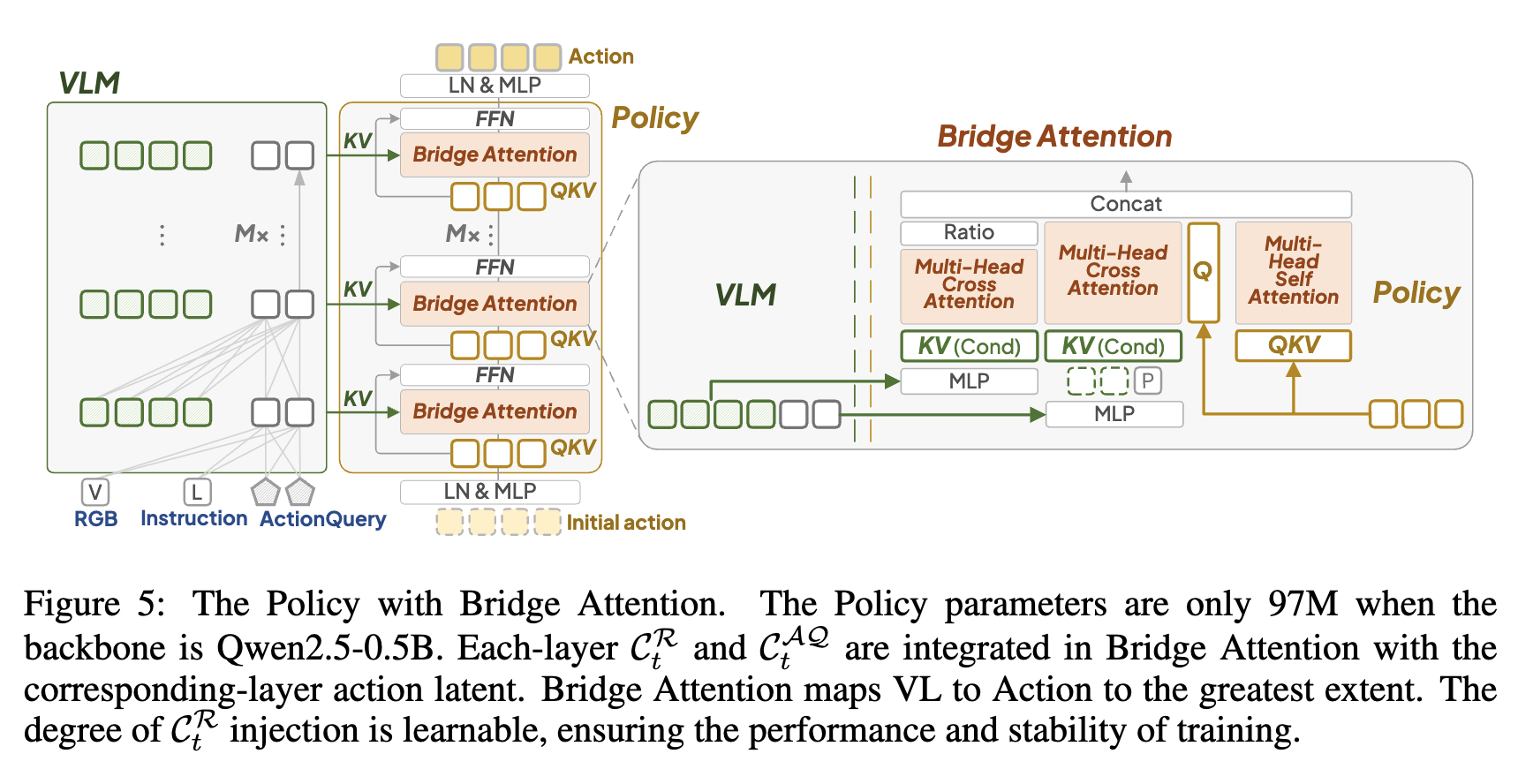
Policy with Bridge Attention
-
Bridge Attention
-
input
- $C_t^R$: t step VLM의 row latent
- $C_t^{AQ}$: t step의 ActionQuery latent
- $A_t^{\tau=0}$: H-step denoising의 inital action
- $P_t$: t step의 (robot arm) proprioceptive (고유수용성) state(상태)
- 관절 위치 (Joint Positions) : ${q_1, q_2, q_3, q_4, q_5, q_6, q_7}$
- 관절 속도 (Joint Velocities): $\dot{q}_1, \dot{q}_2, \dot{q}_3, \dot{q}_4, \dot{q}_5, \dot{q}_6, \dot{q}_7$
- 그리퍼(Gripper) 상태: 로봇의 손 역할을 하는 그리퍼의 현재 열림 정도(폭)와 움직이는 속도: $\text{gripper_width}, \text{gripper_velocity}$
-
1개의 self-attention + 2개의 cross-attention으로 구성
-
$C_t^R$을 key, value + $A_t^{\tau}$를 query로 cross attention
- Raw latent는 0으로 초기화하여 learnable ratio $g$로 학습
-
$C_t^{AQ}$을 key, value + $A_t^{\tau}$를 query로 cross attention

- Proprioceptive state $P_t$를 $C_t^{AQ}$와 concat하여 cross attention
-
$A_t^{\tau}$를 self-attention

-
-
-
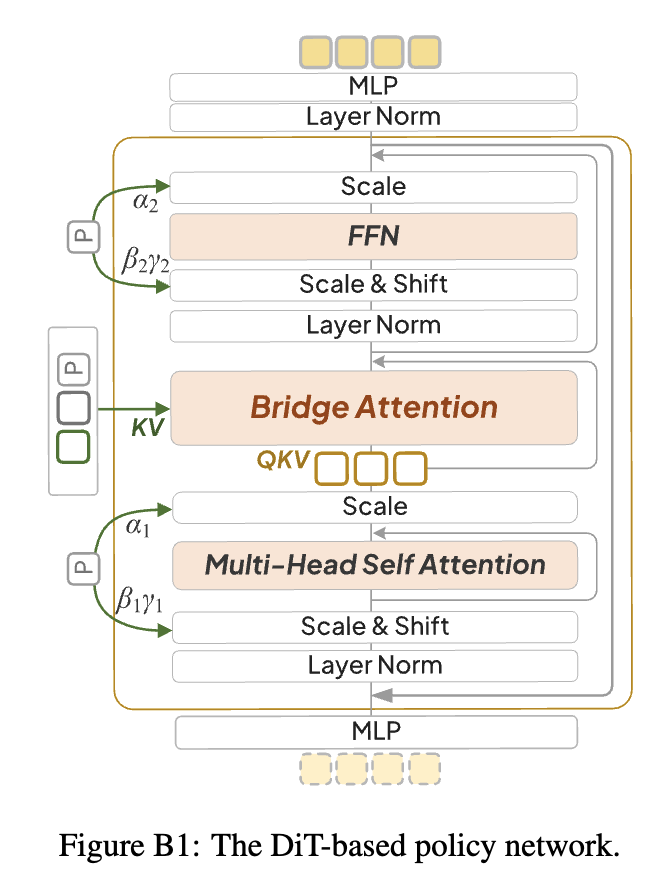
DiT (Diffusion as Tranformers)에서 L1 loss로 바꾼 모델
-
Loss: L2 loss $\to$ L1 loss로 바꾼게 성능이 좋음
- L2 loss

-
L1 loss

5. Experiments
-
Dataset
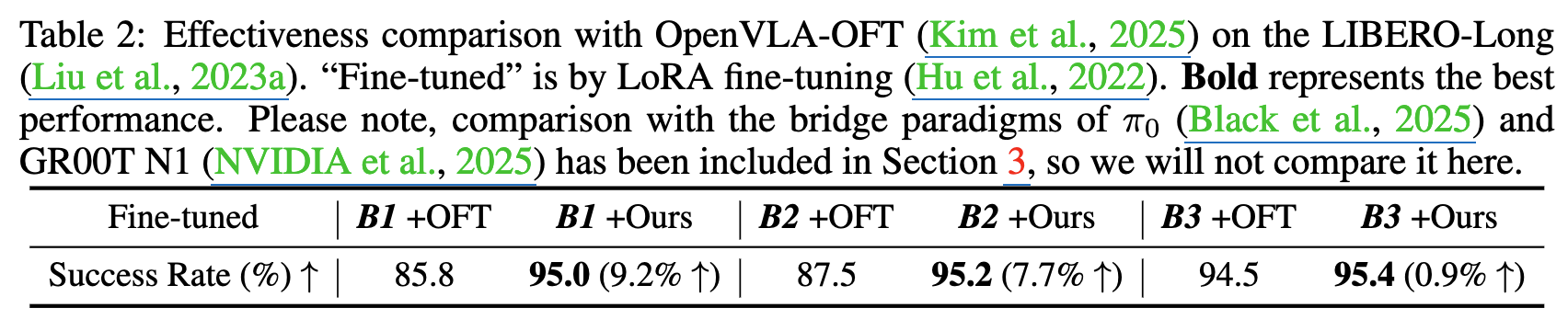
- LIBERO-Long
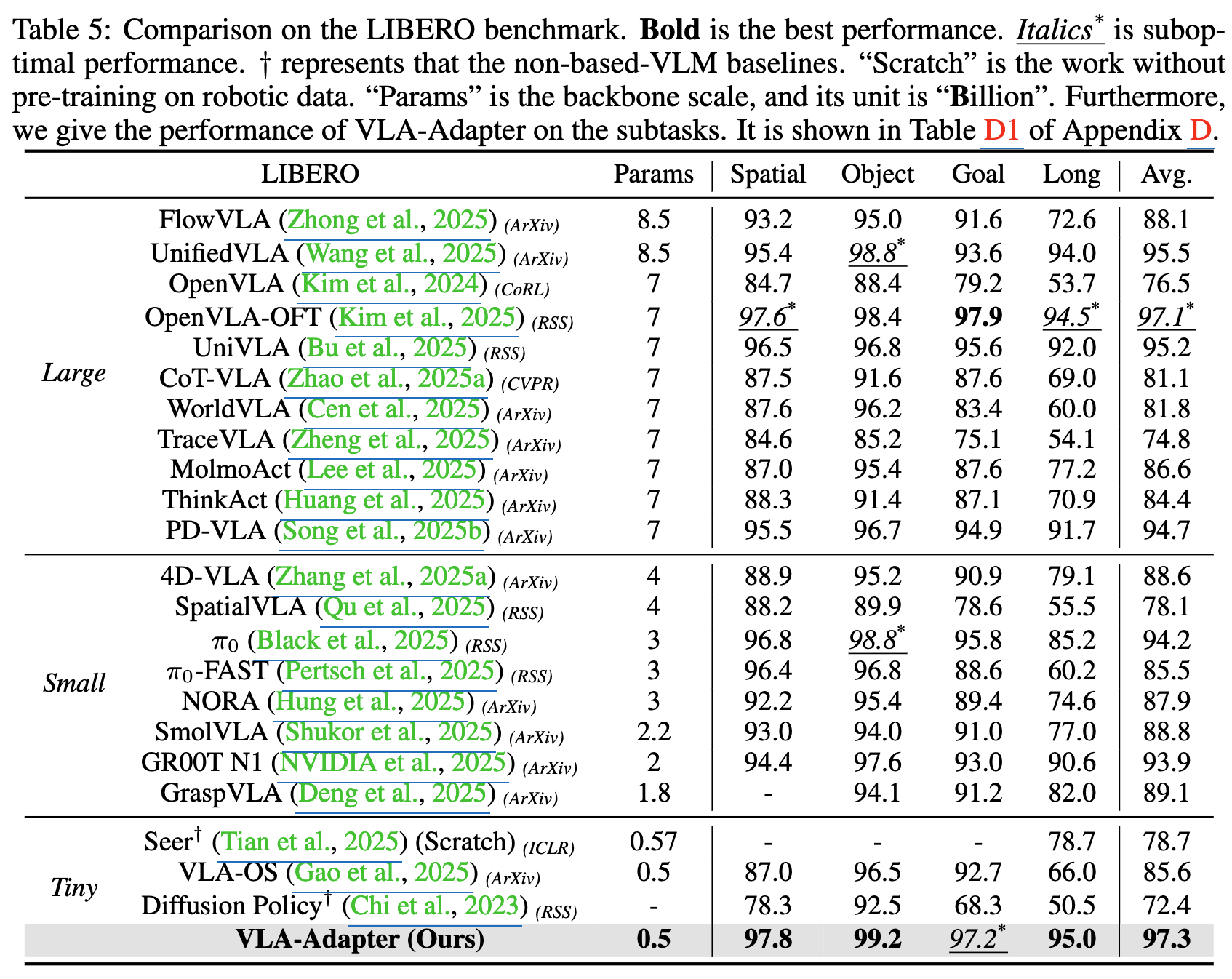
- LIBERO
- CALVIN
-
Experiment Setting
- $B_1$: Qwen2.5-0.5B
- $B_2$: LLaMA2-7B
- $B_3$: OpenVLA-7B
-
정량적 결과
-
LIBERO-Long
-
LIBERO
-
Linear Probing

-
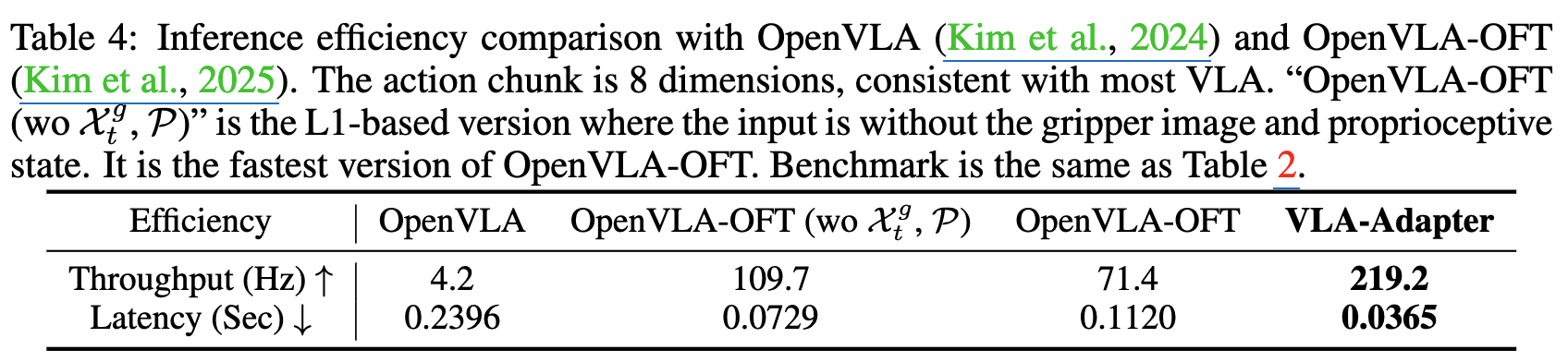
Inference Efficiency
-
-
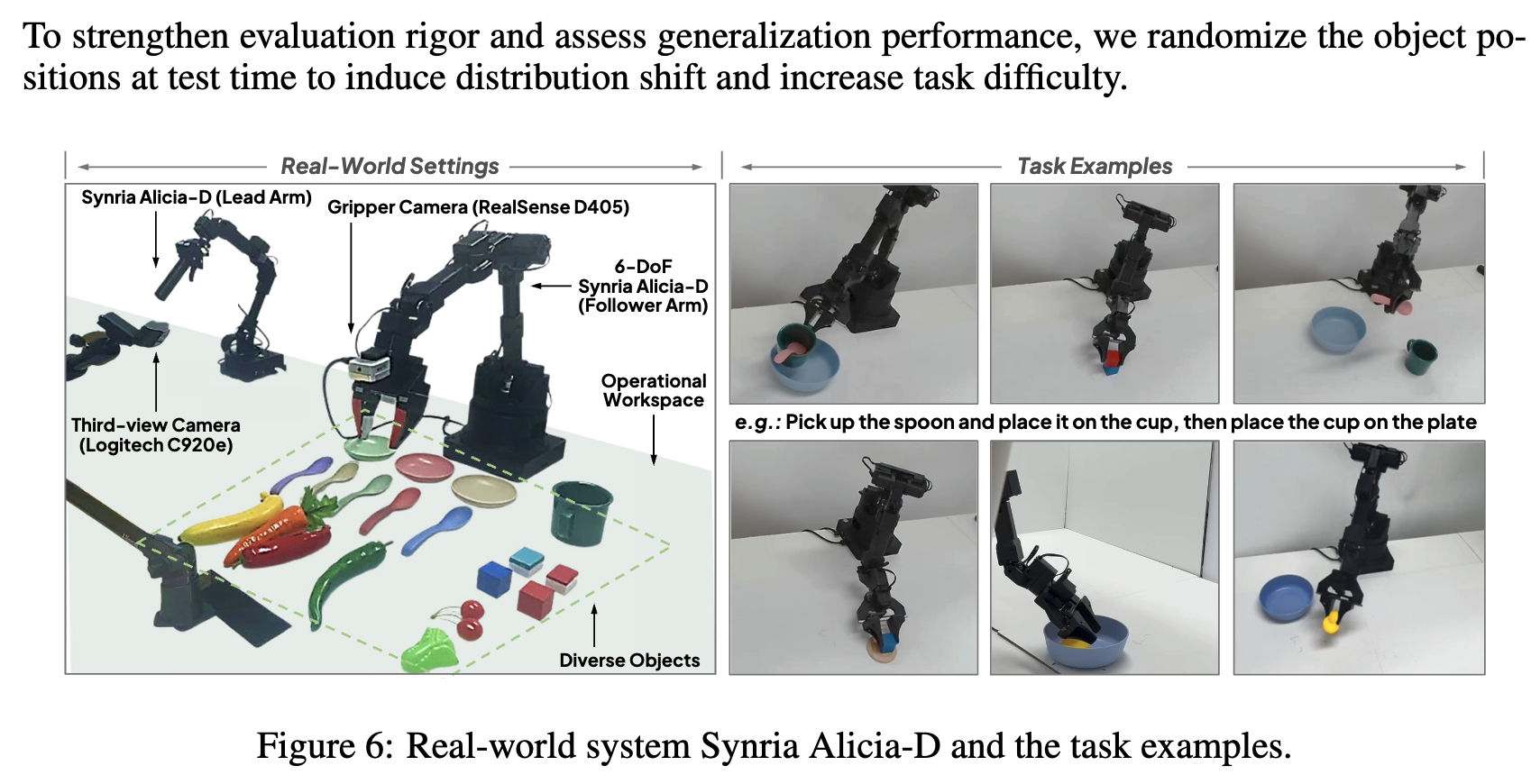
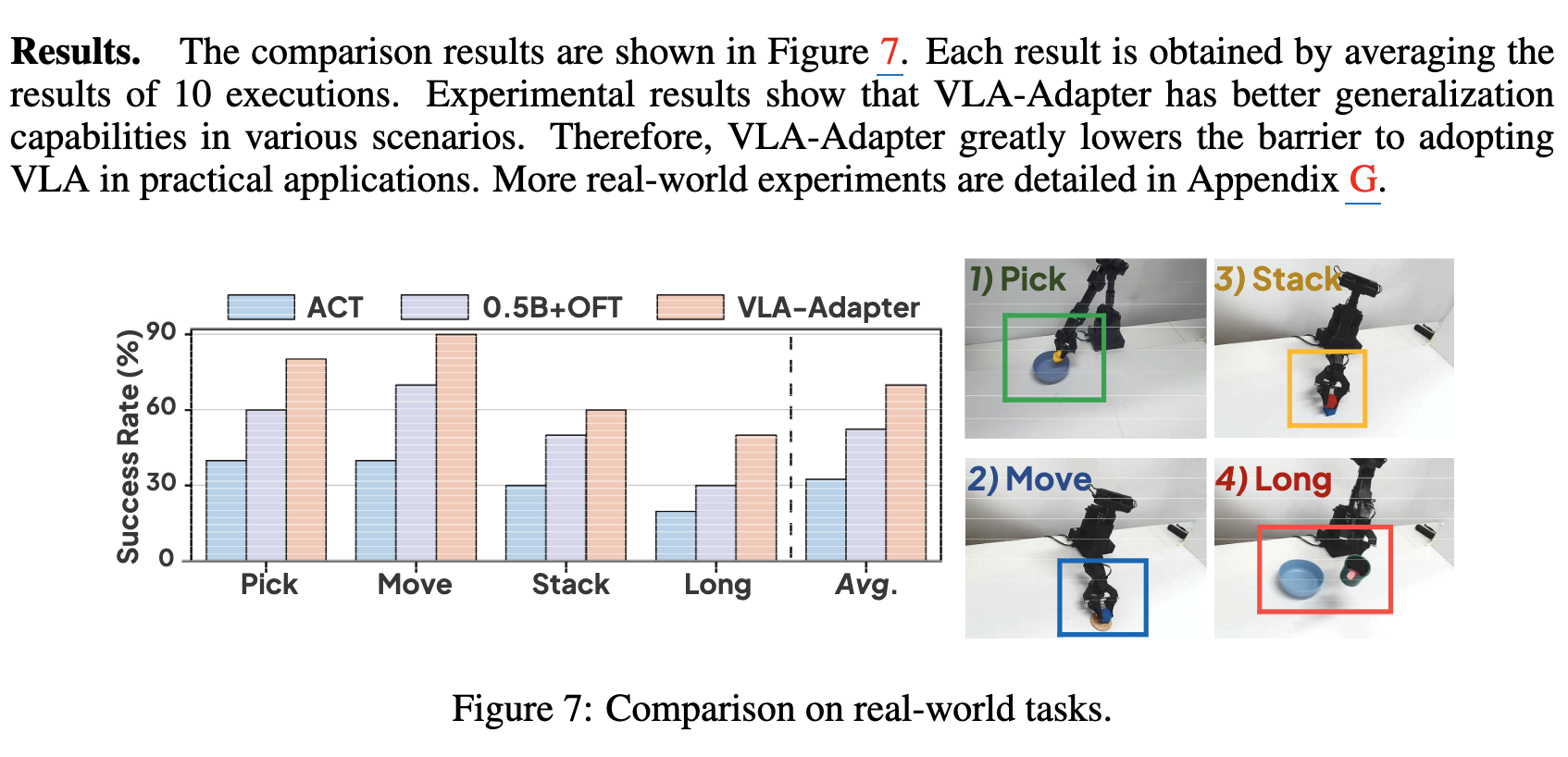
Real-world Scenraio
-
Ablation Studies
-
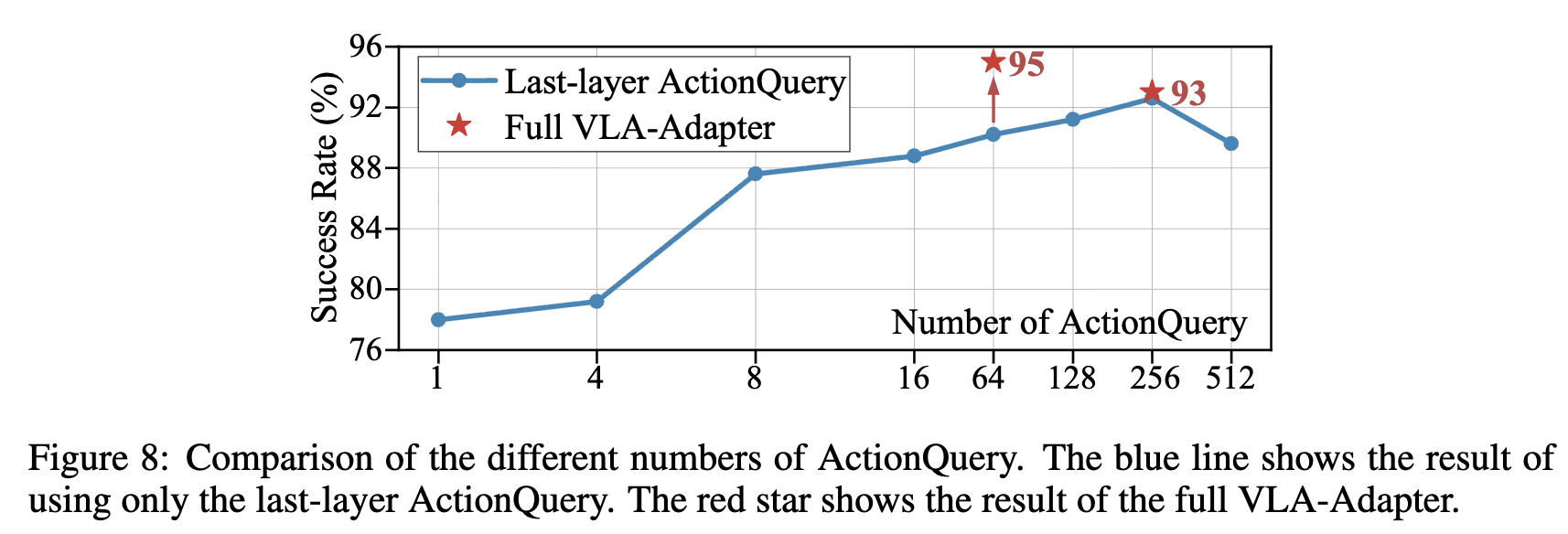
ActionQuery 갯수에 따른 분석
-
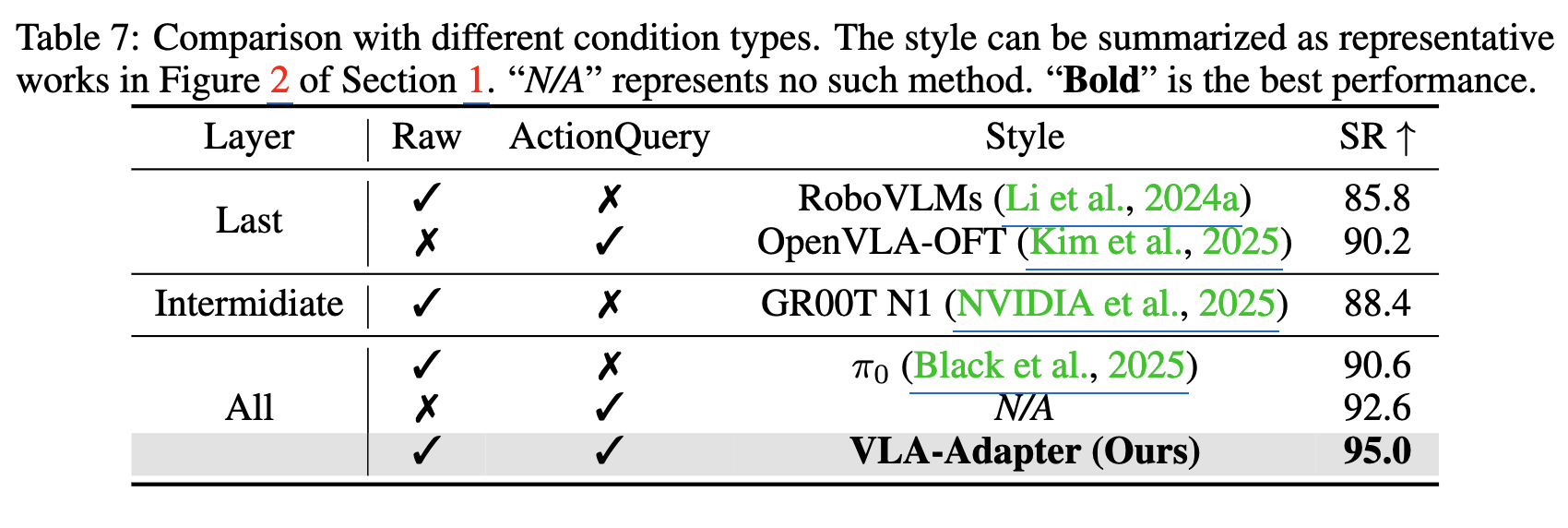
Condfition Type에 따른 분석
-
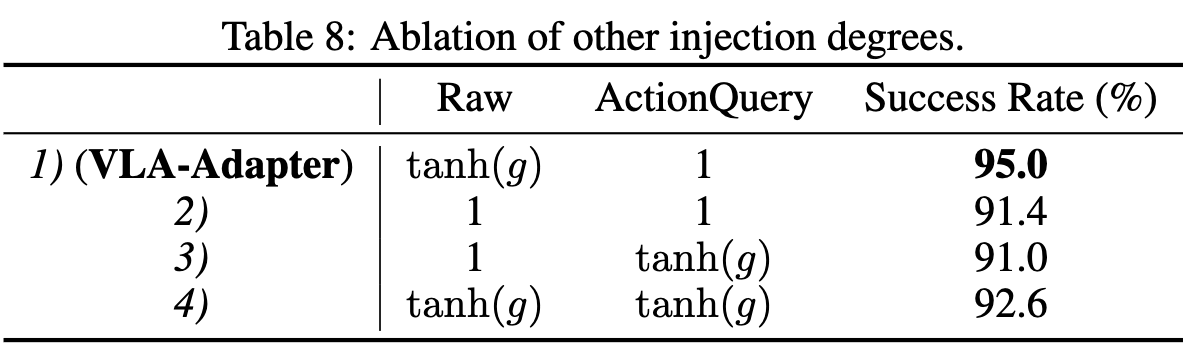
Injection 정도에 따른 분석
-