[GM][3DOD] MAGIC DRIVE : STREET VIEW GENERATION WITH DIVERSE 3D GEOMETRY CONTROL
[GM][3DOD] MAGIC DRIVE : STREET VIEW GENERATION WITH DIVERSE 3D GEOMETRY CONTROL
- paper: https://arxiv.org/pdf/2310.02601
- github: https://github.com/cure-lab/MagicDrive
- ICLR 2024 accepted (인용수: 21회, ‘24-04-29 기준)
- downstream task: GM for 3DOD
1. Motivation
-
3D Object Detection image synthesis를 위해서는 3D 정보의 손실 (ex. height, depth) 없이 3D environment을 필요로 함
-
하지만 기존 연구들 (BEVGen, BEVControl)은 height가 없거나, depth 정보가 없는 2D만 가지고 3D image를 생성함
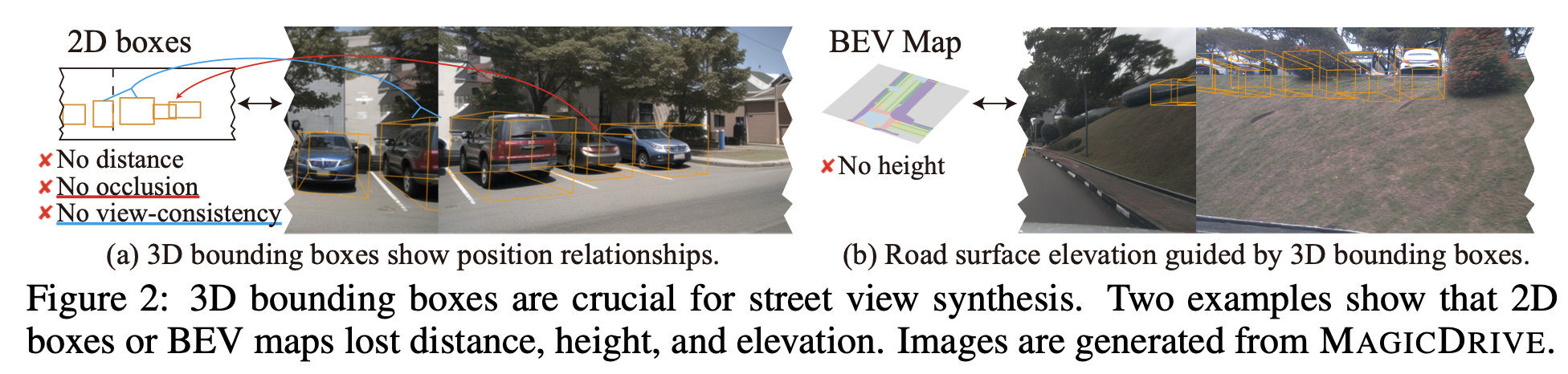
$\to$ 3D environment 정보를 효율적으로 encoding하여 3D Bbox와 함께 synthesis하는 방법은 없을까?
2. Contribution
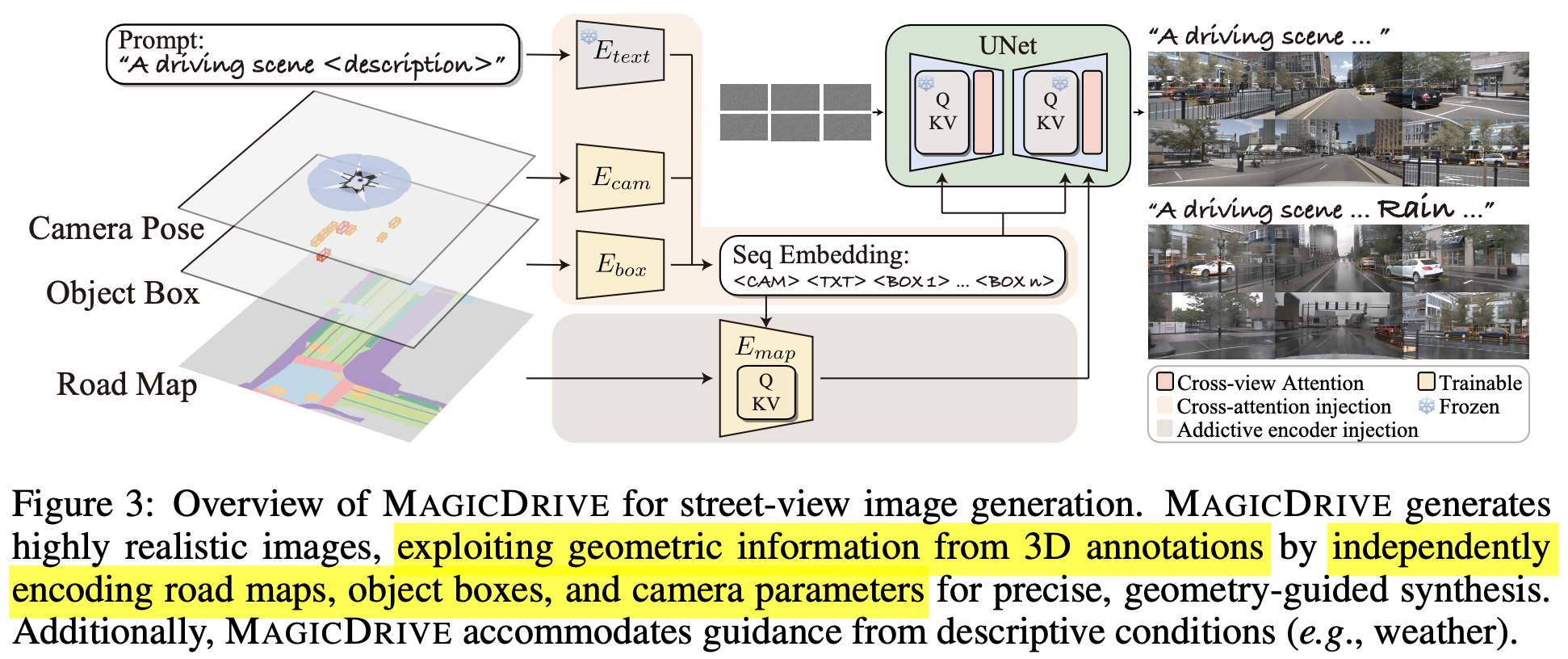
- 3D 정보와 BEV를 활용하여 multiview perspective camera & video synthesis를 수행하는 Magic Drive를 제안함
- Multi camera view consistency의 challenge를 효율적으로 해결하는 3D geometric data 관리 전략을 제안함
- 기존 3D streetview generation task 뿐 아니라, 3D perception task의 성능을 향상시킴
3. Magic Drive
-
preliminaries
-
Conditional Diffusion

-
Laten Diffusion : x$_0$를 z$_0$로 변경

-
-
overview
31. Geometric conditions encoding
-
scene-level encoding
-
P: camera pose. sine/cosine로 구성되어 high frequency variation을 잘 취득하고자 Furior Transform을 거쳐 embedding


-
L: scene annotations. Pretrained Clip text encoder를 활용함
“A driving scene image at {location}. {description} ”

-
최종 scene level embedding
-
-
3D Bounding Box encoding
-
class 정보는 average pooling하여 embedding
-
Bbox 정보는 Fourior Transform 후에 embedding
- $b \in \mathbb{R}^{8 \times 3}$

-
view마다 visible bbox가 다르므로 visible 영역만 사용

-
단 학습 중에는 CFG(Conditional Free Guidance)의 특성상 주기적으로 condition을 drop하며 학습해야 함. 따라서 invisible도 일정 비율로 random하게 augmentation 수행
-
-
Roadmap encoding
- 2D grid format으로 구성되어 있음. 이 형태는 별도의 addictive encoder로 embedding하는게 효율적이라 알려짐 (Adding conditional control to text-to-image diffusion models)
- 별도의 2D & 3D view transformation이 explicit하게 없더라도, 위에 3D bbox와 camera pose만 가지고 addictive encoder가 implicit하게 transformation을 수행하도록 학습이 됨
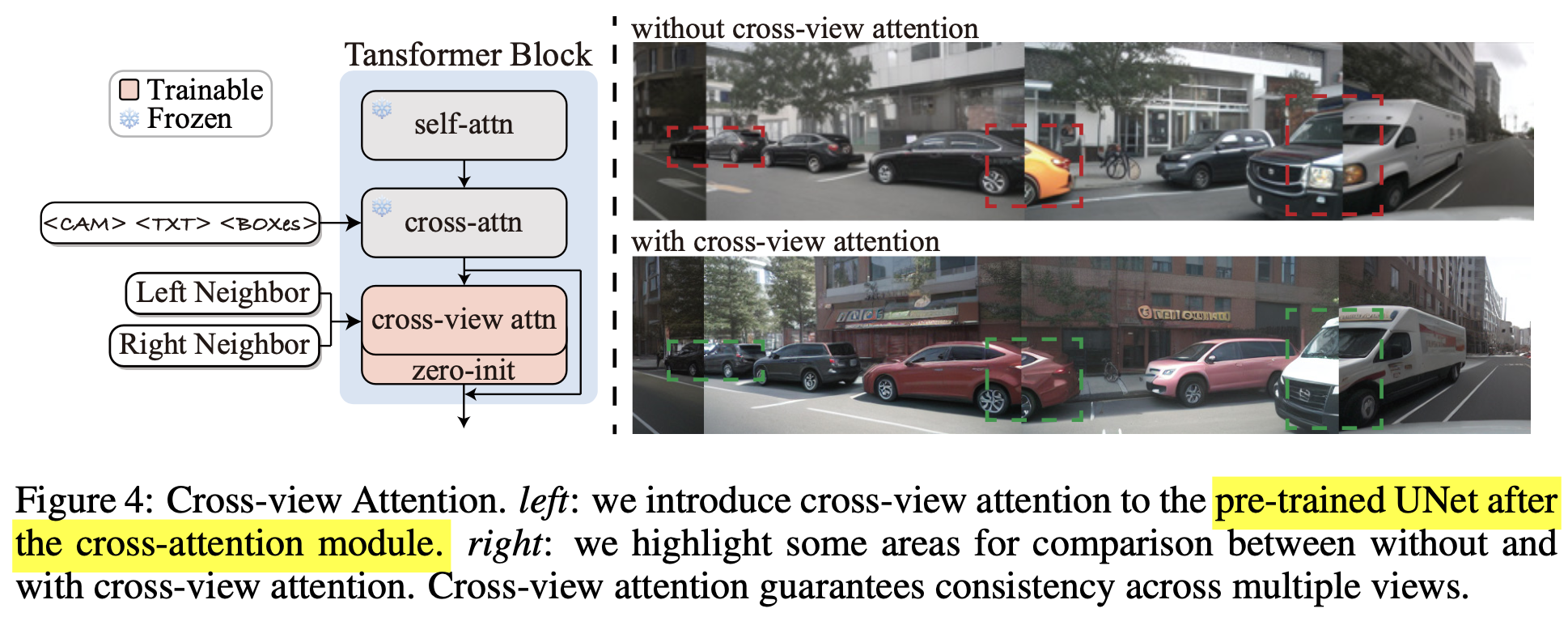
3.2 Cross-view Attention Module
-
Multi-camera view generation에서는 consistent한 image synthesis가 매우 중요함 $\to$ 이웃 scene간 cross-attention 도입
-
overview

-
$t, l, r$: target view, left view, right view
-
h$^v$: hidden state of target view
-
정성적 비교 (vs. BEVControl)
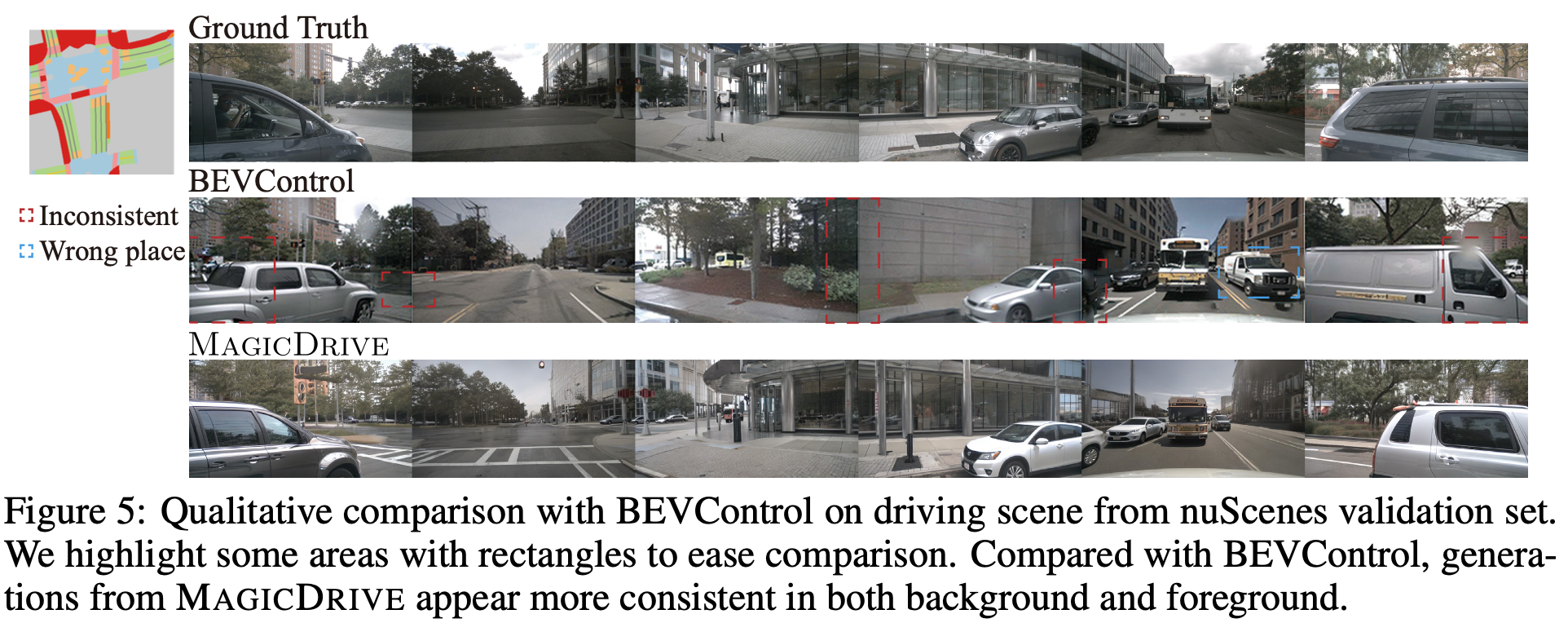
-
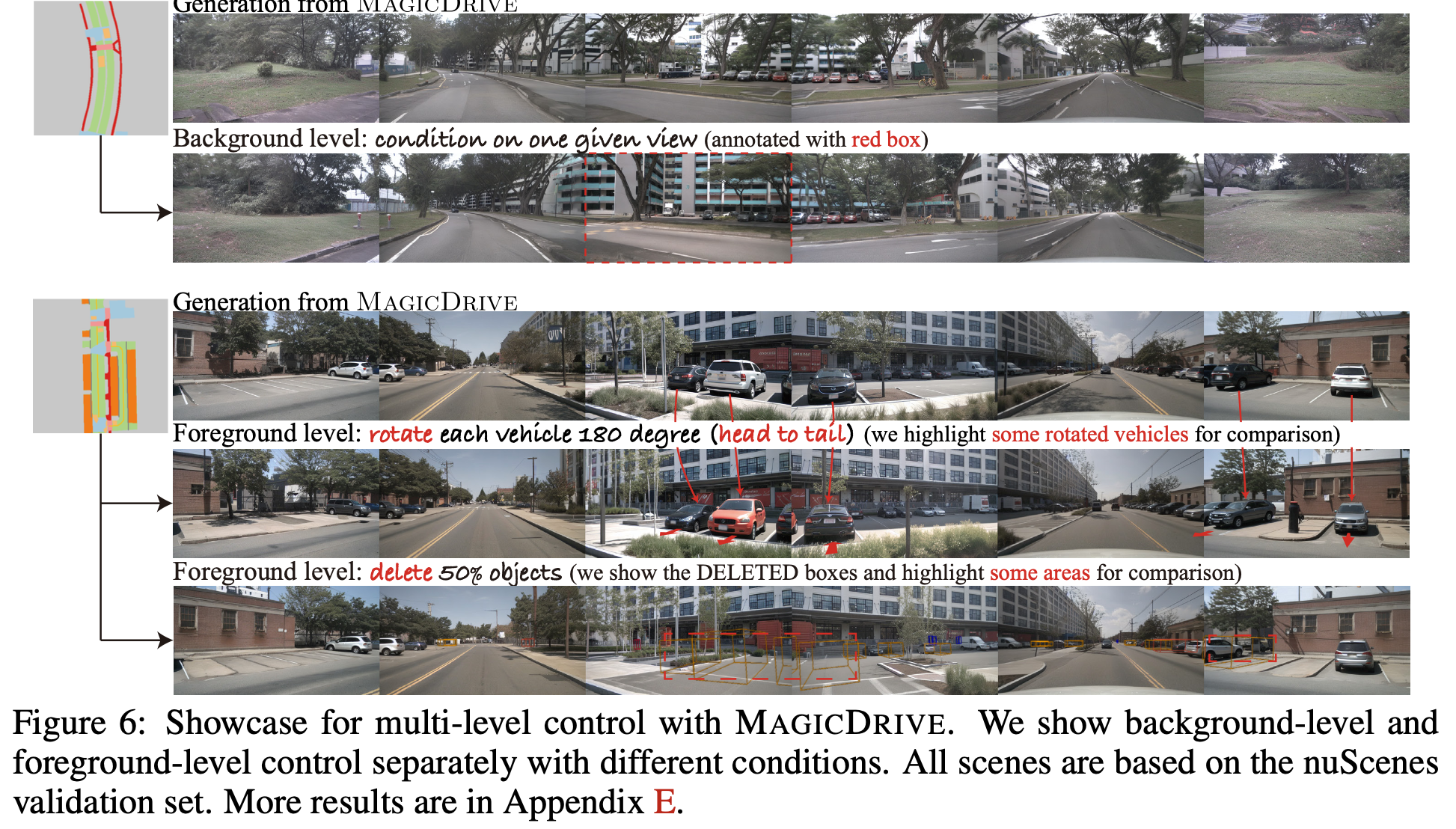
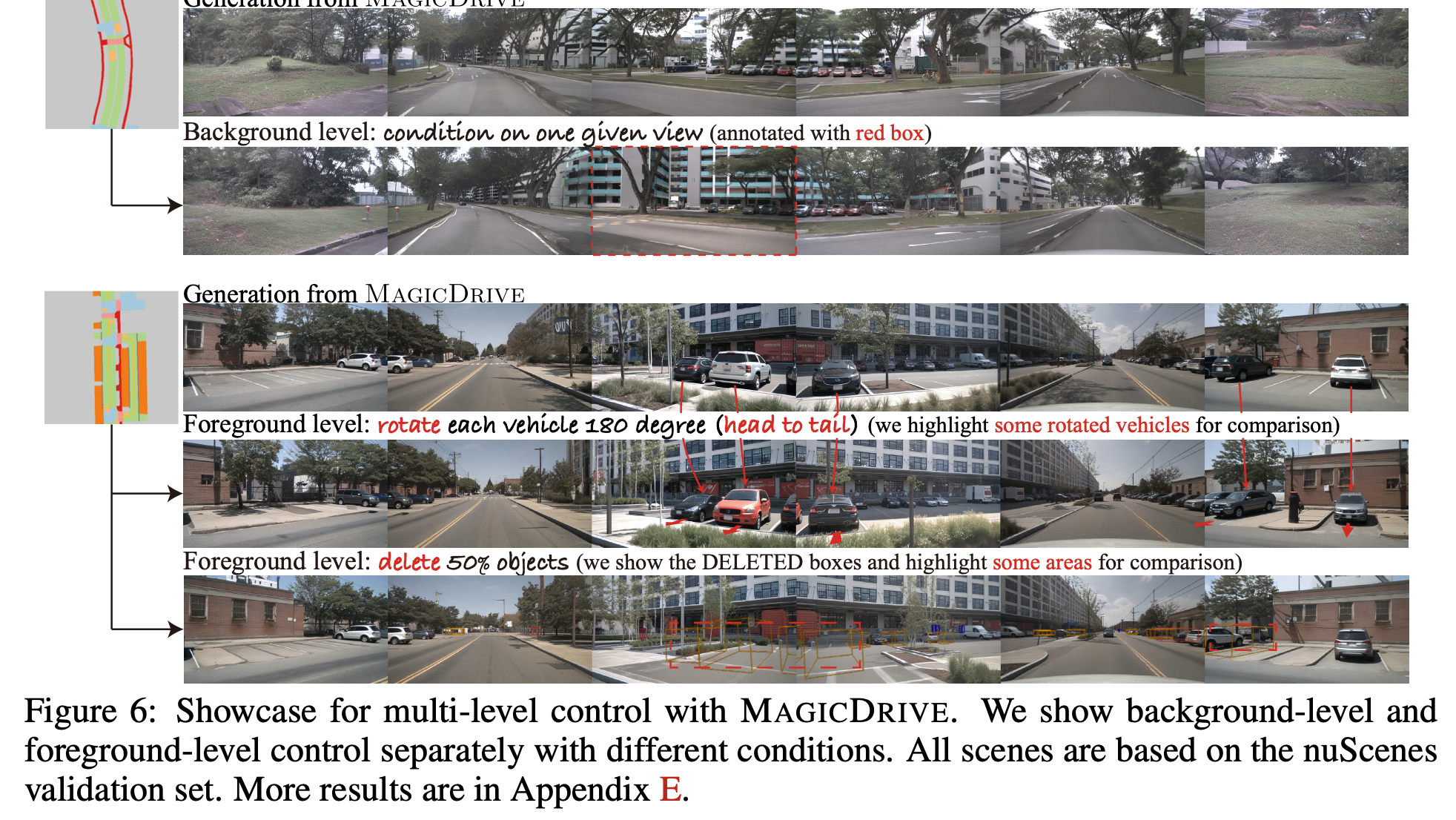
Background / Forground control 정성적 비교
3.3 Model Training
-
Objective

- invisible bbox 10% random augmentation 수행 (CFG에서 한번 언급)
- Naive한 학습 방지하고자 near view image에 random noise 추가
4. Experiments
-
Evaluation Metric
- Realism (Fidelity): 얼마나 real image와 유사하며 (FID), semantic meaning이 훼손되지 않았는가 (mAP)
- Controllability (Trainability): 얼마나 synthesized image가지고 3D perception task의 성능이 향상했는가 (mAP, mIoU)
-
Fidelity
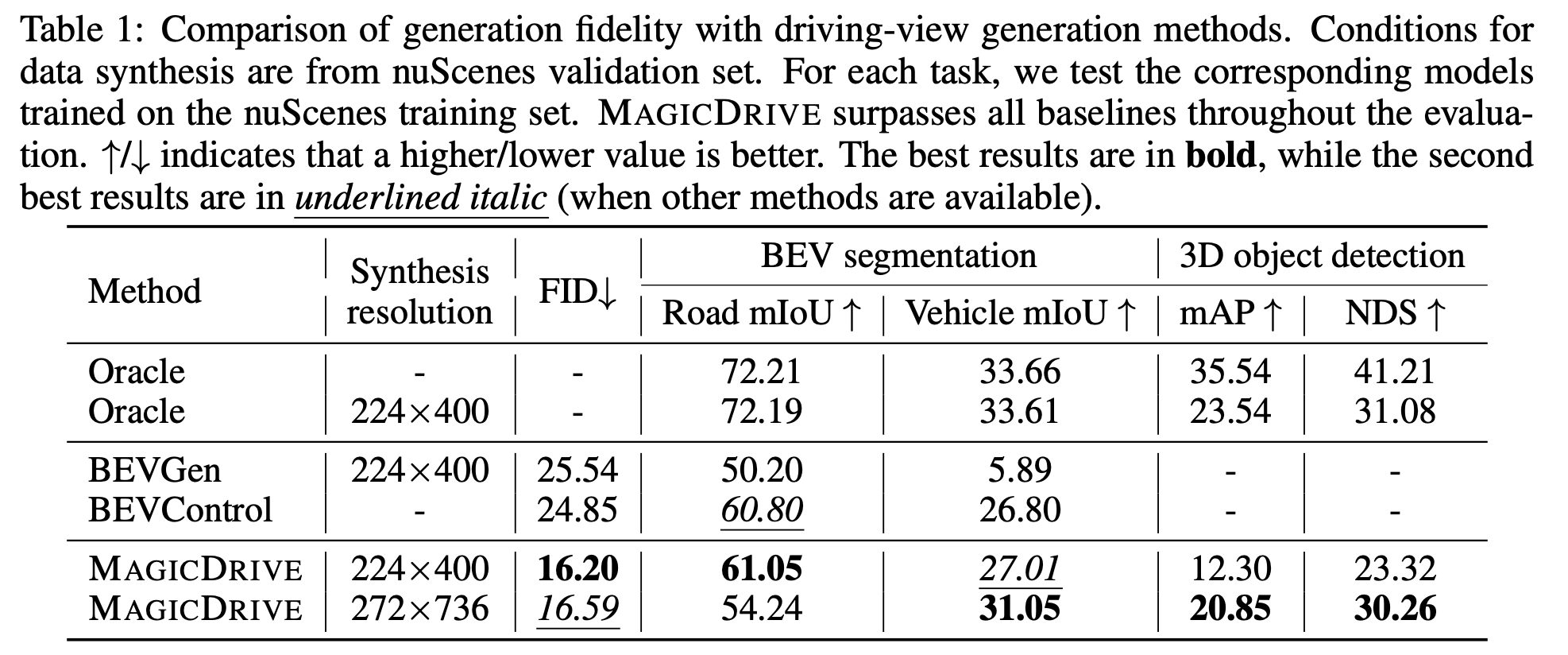
-
Trainability
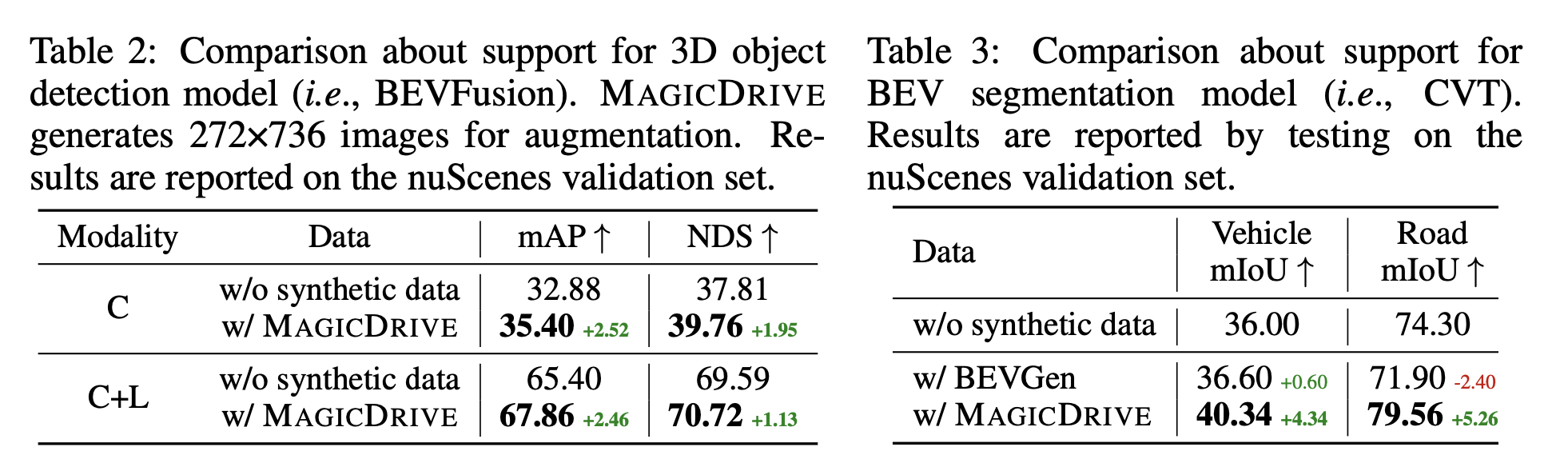
-
정성적 분석
-
Target text: Sunny & Rainy
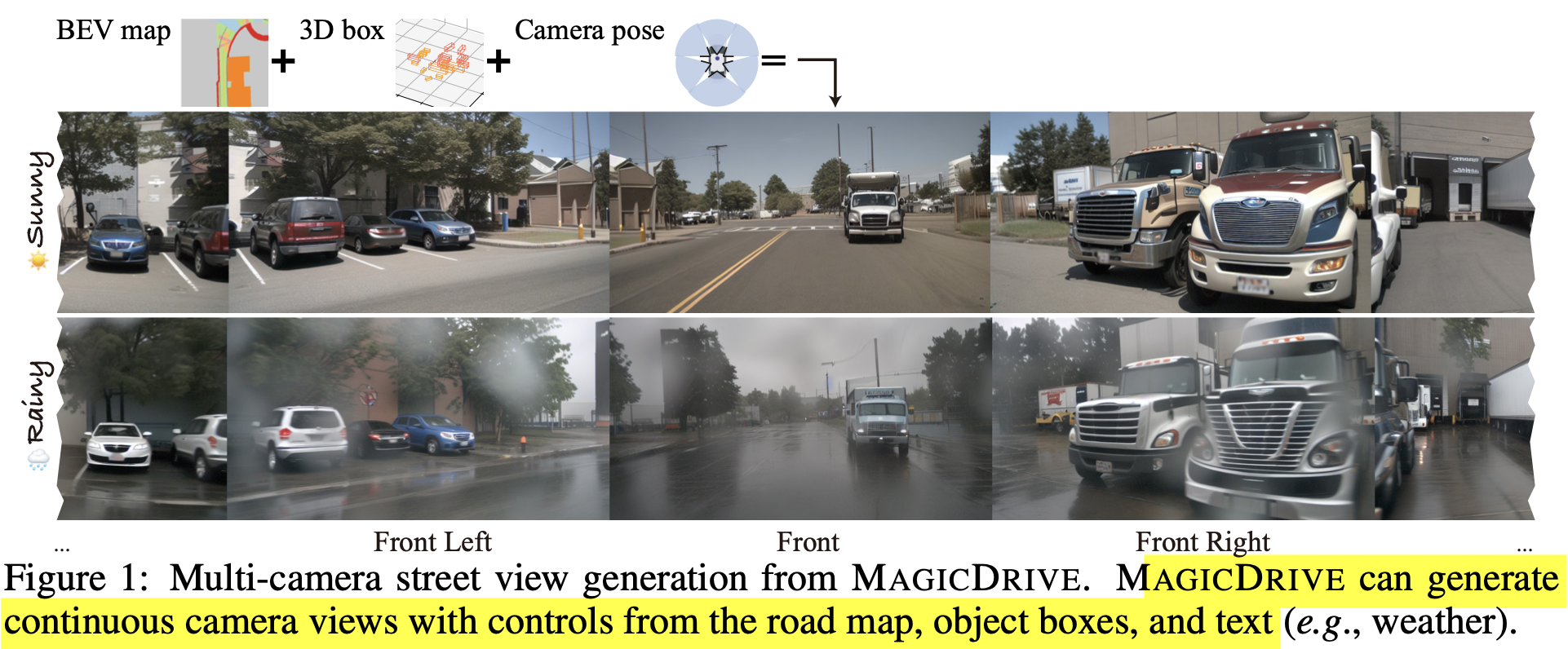
-
Forground / background control
- car frount/back flip, 혹은 50% bbox 제거
-
-
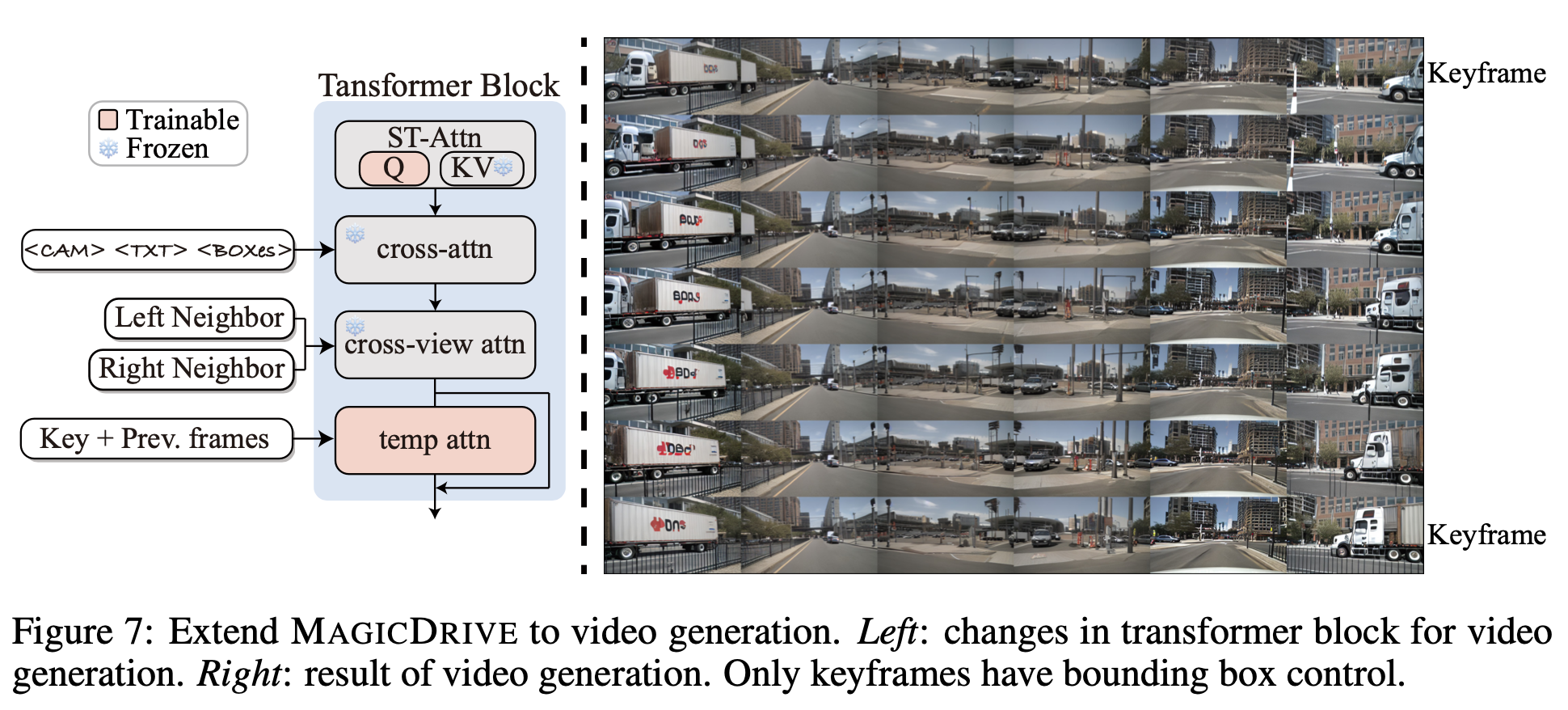
Video Generation
-
Temporal attention을 추가
-
-
Ablation
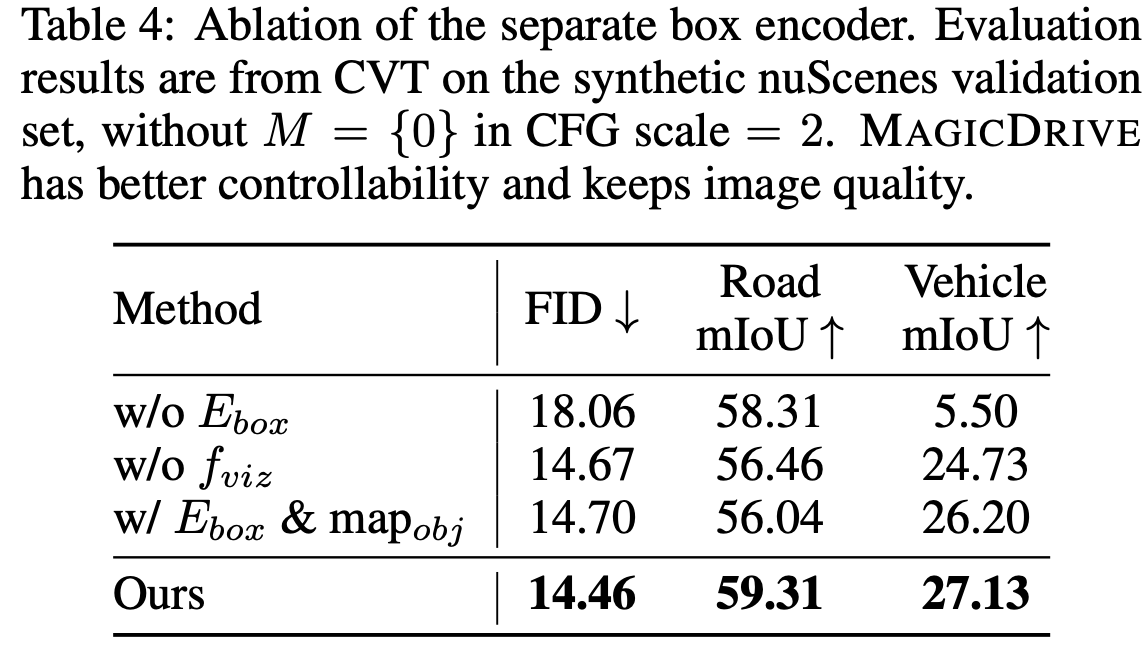
-
CFG
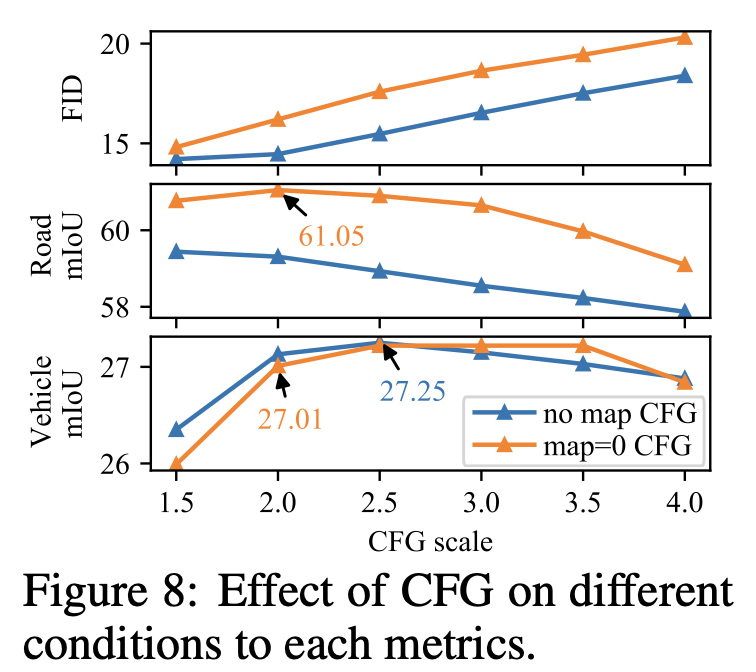
-