[MM] Groma: Localized Visual Tokenization for Grounding Multimodal Large Language Models
[MM] Groma: Localized Visual Tokenization for Grounding Multimodal Large Language Models
- paper: https://arxiv.org/pdf/2404.13013
- github: https://github.com/FoundationVision/Groma
- ECCV 2024 accepted (인용수: 15회, 24-10-30 기준)
- downstream task: Visual Reference Comprehension & Grounding, VQA
1. Motivation
- 최근 MLLM은 localization 능력이 떨어져, visual context를 잘 이해하지 못한다.
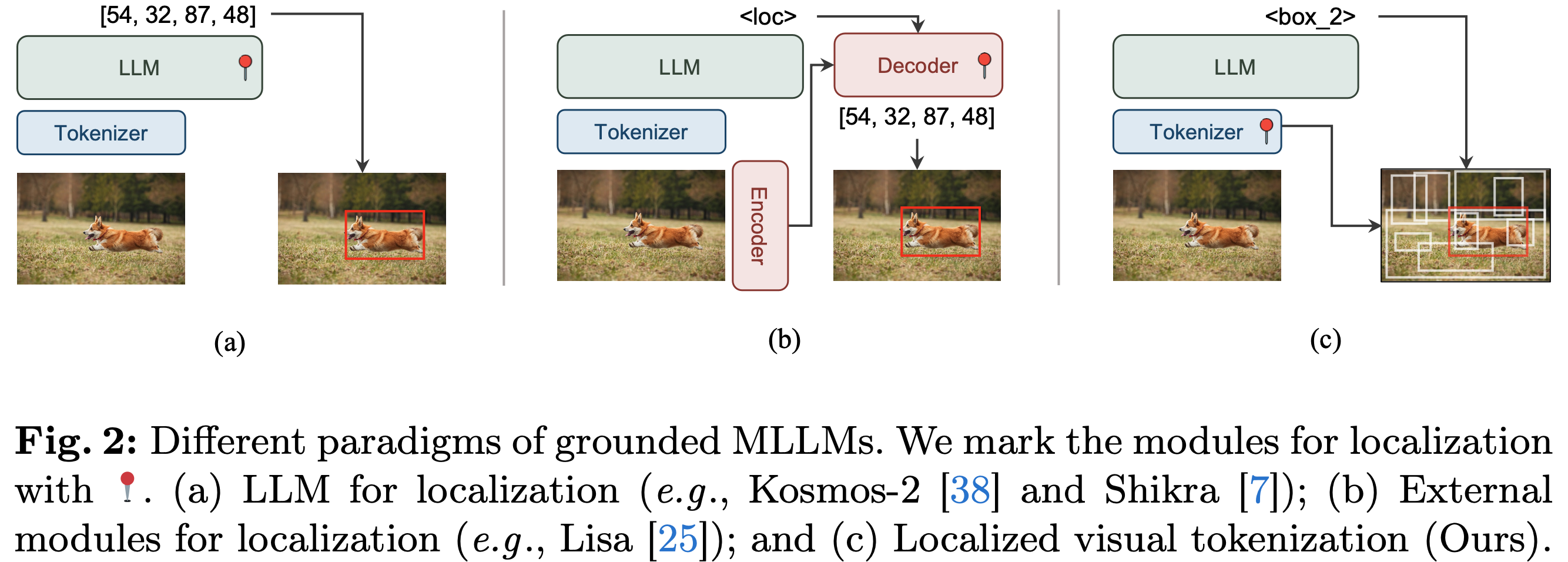
- 물체의 coordinate를 직접적으로 예측하는 방법: 고해상도 이미지 처리하기 위해서 visual token이 많아지는 challenge가 있음
- LLM의 sequence를 처리하는 태생적 한계: 이를 극복하고자 외부 모듈 (ex. SAM)을 도입하는 방법 $\to$ 추론 속도에 지장
-
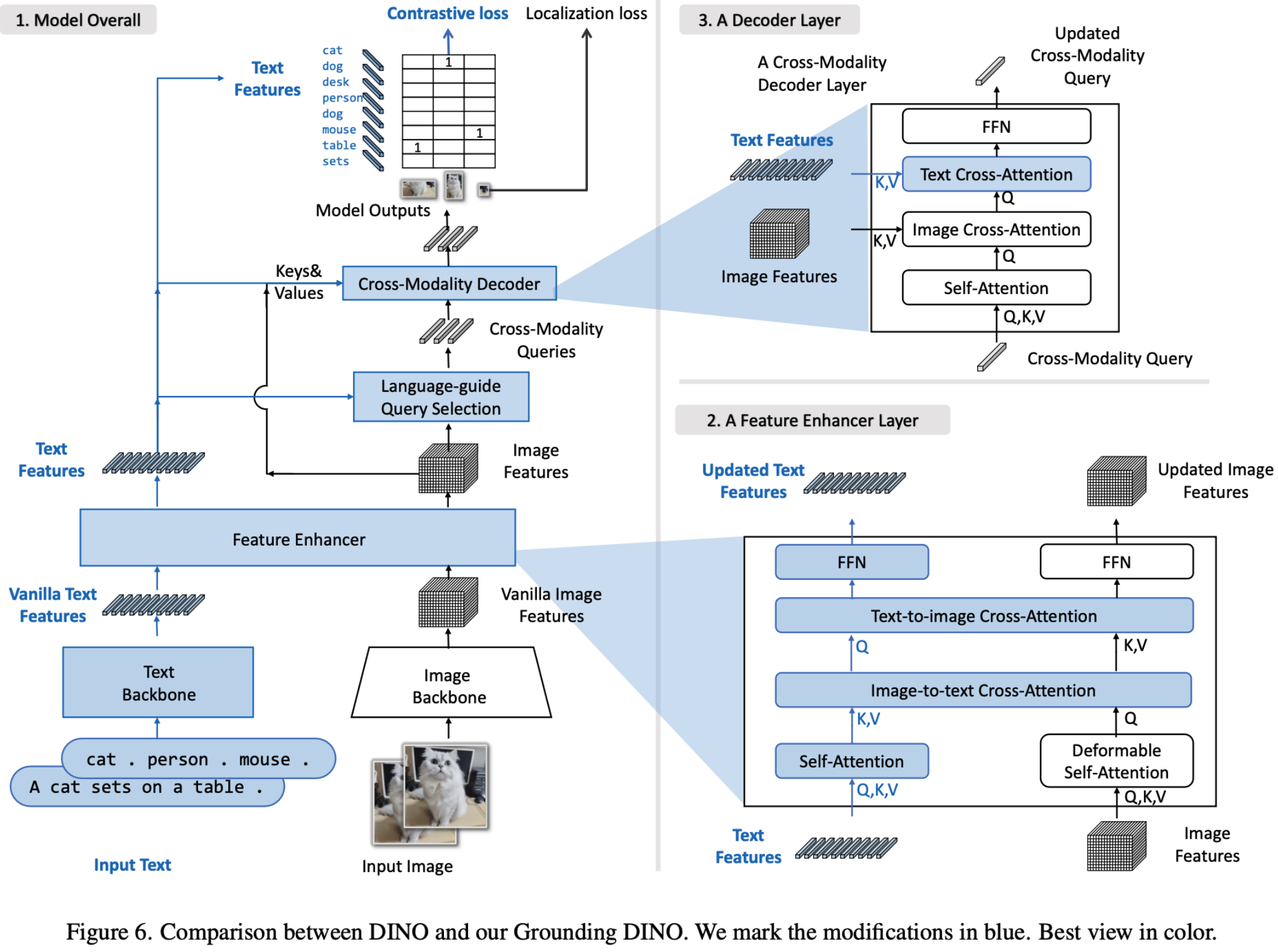
Open-vocabulary Object Detection에서 영감을 얻어, grounding task를 2개로 나누면 어떨까? (Perceive-then-understand)
ex. Grounding-DINO
-
Localization: Perceptual skill은 요구되나, semantic understanding은 불필요 $\to$ tokenizer
- 장점
- 고해상도 이미지 입력을 tokenizer에만 주고, LLM은 저해상도 입력을 줌으로써 계산량은 줄이고, localization 성능은 보존이 가능함
- referring input (설명 부분에 해당) & grounding output (object coordinate)를 region token으로 통합할 수 있음
- 장점
-
Recognition: 검출한 object를 text와 연결 $\to$ LLM
-
2. Contribution
-
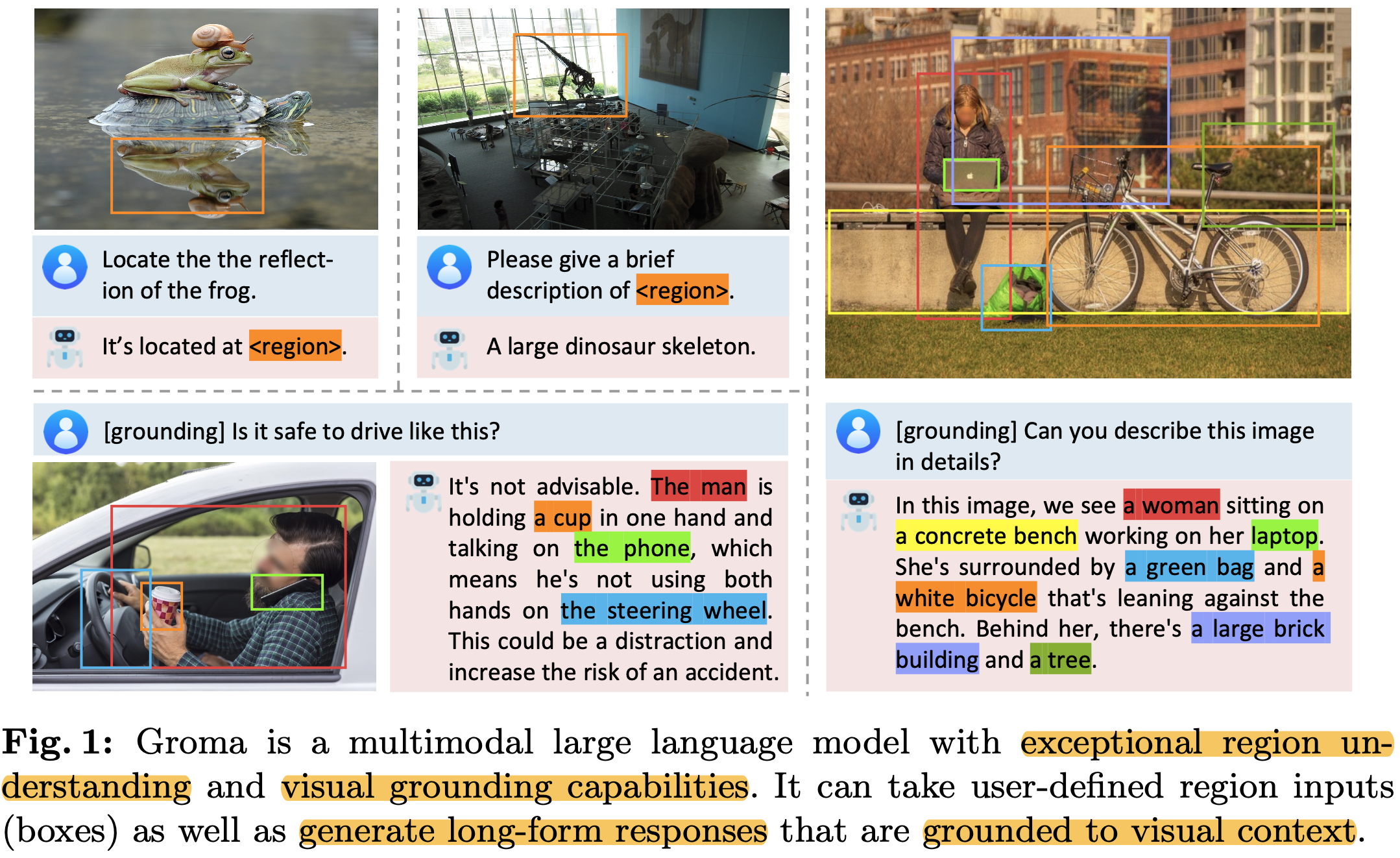
Localized & fine-grained visual perception 능력을 갖는 Groma (Grounded Multimodal Assistant)를 제안함 (Groma: 라틴어로 정밀 측정기라는 의미도 있다고함)
-
region tokenization: RoIs (Regions of Interest)를 식별하고 encoding하여 region token으로 변환하는 과정
$\to$ region token과 RoI가 연관되어 있기 때문에, region token을 MLLM은 참조하기만 하면 됨 (기존에는 coordinate 4개 값을 모두 예측했어야 함)
$\to$ user가 입력한 region input 역시 encode할 수 있음
-
-
Dataset: GPT-4V를 기반으로 long-form grounded data인 “Groma Instruct”를 생성함
-
Referring & Grounding benchmark에서 SOTA 달성 + image-level understanding에서도 좋은 성능을 보임
3. Groma
3.1 Model Architecture
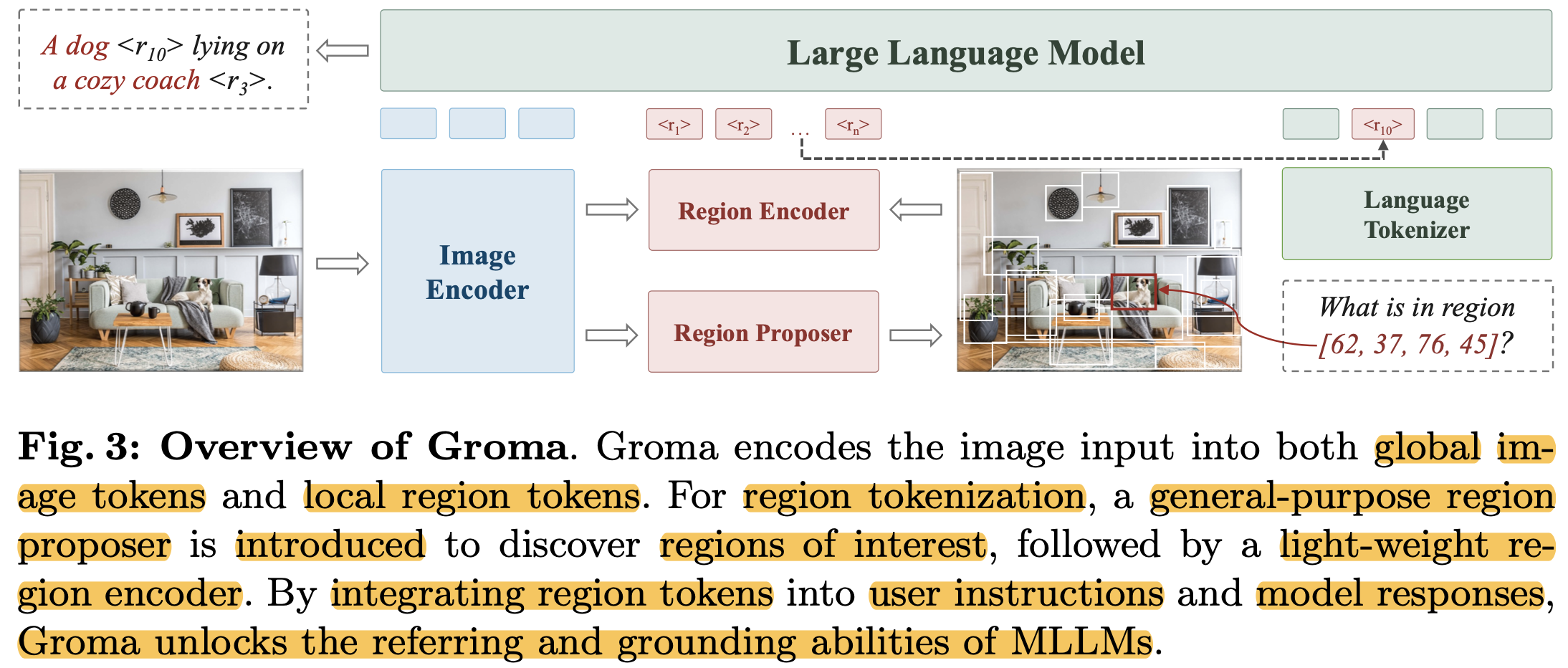
- 4개의 모듈로 구성: (1) image encoder: image tokenizer (2) region proposer: RoI 찾는 모듈 (3) region encoder: region-level image tokenizer (4) LLM
-
Image Encoder: DiNOv2@448x448 pretrained ViT를 사용
- 1024 token $\to$ 256으로 변환하는 2D neighbor patch token merging을 사용
-
Region Proposer: Deformable-DETR을 사용
- 4개의 마지막 Image encoder layer를 feature pyramid로 활용
- 300개의 region proposal을 출력 (+NMS + objectness score)
- binary classifier를 사용
-
Region Encoder: Region propser의 output (region proposals, bounding-boxes)를 region token으로 변환
-
Multi-scale RoIAlign layer: 해당 영역의 feature를 crop & feature fuse를 하여 region tokens을 생성
$\to$ 기존의 numerical representation of position (ex. x,y,w,h)에 비해 해당 이미지 영역에 대한 feature와 semantically align되므로 LLM 모델이직관적으로 이해
-
-
LLM: Vicuna-7B
- Adapter: MLP layer (LLaVA-1.5와 동일) , image-token & region-token을 LLM의 input feature space로 mapping 역할
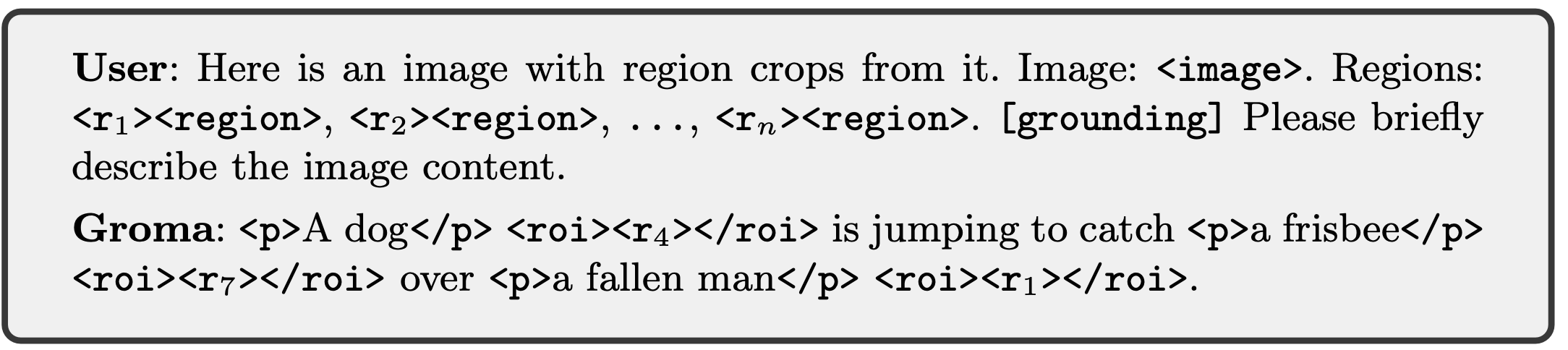
3.2 Input & Output Formatting
-
User-specified region을 입력으로 (referring) 받고, visuall grounded answer (grounding)을 region token으로 처리할 수 있음
-
region token: Region proposal 내 정밀한 location 정보를 담고 있음. LLM의 text output과 연결고리 역할
-
Proxy tokens: Continuous한 region token을 codebook에 직접 통합할 수 없어 대신 register하고자 추가함

-
-
Grounding Output (Region Proposer의 출력값 활용)
-
, : image token과 region token이 대체되는 placeholder 역할 - ‘<p>, ‘</p>: grounded phase의 시작과 끝을 알리는 역할
-
, : reference region의 시작과 끝을 알리는 역할
-
-
Referring Input (User-specific region을 활용)

3.3 Model Training
-
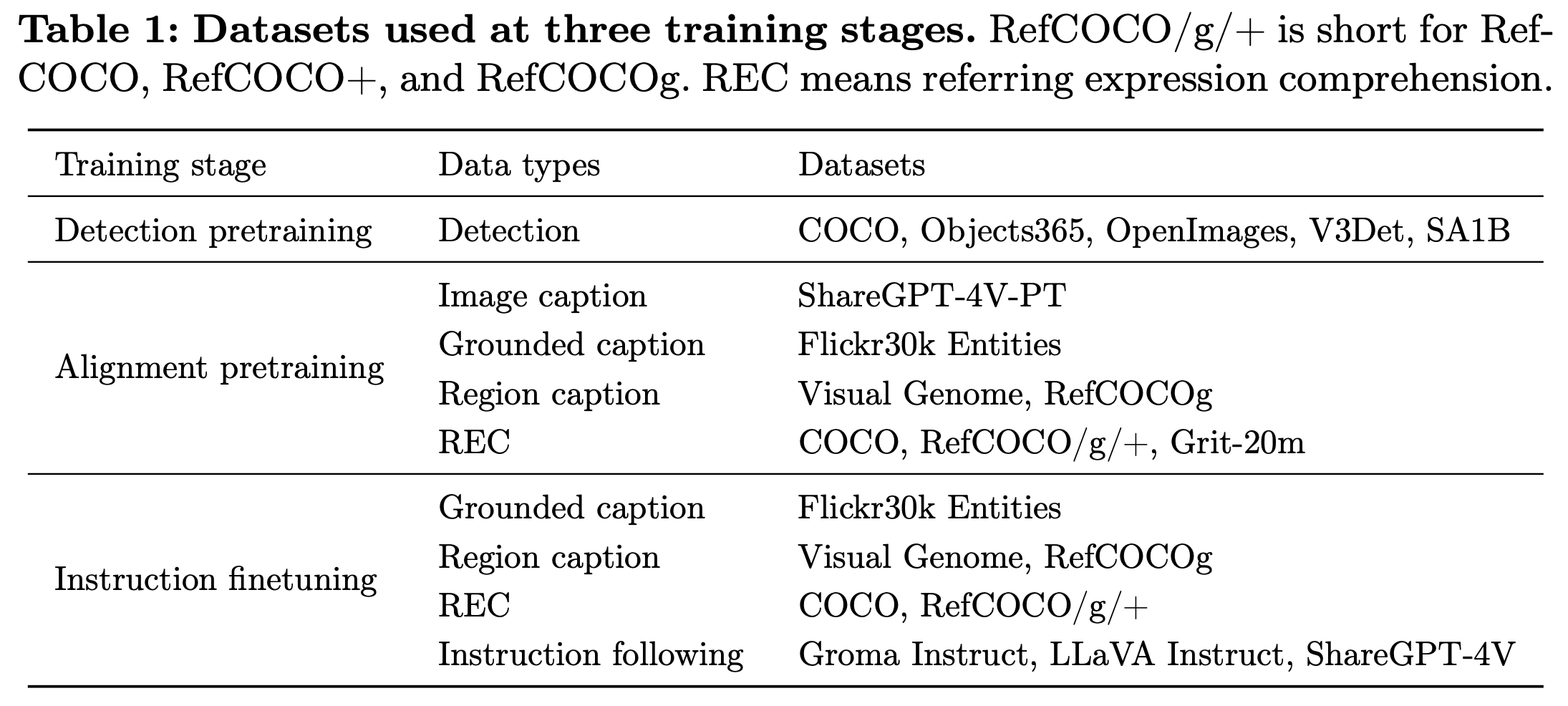
3개의 stage로 학습
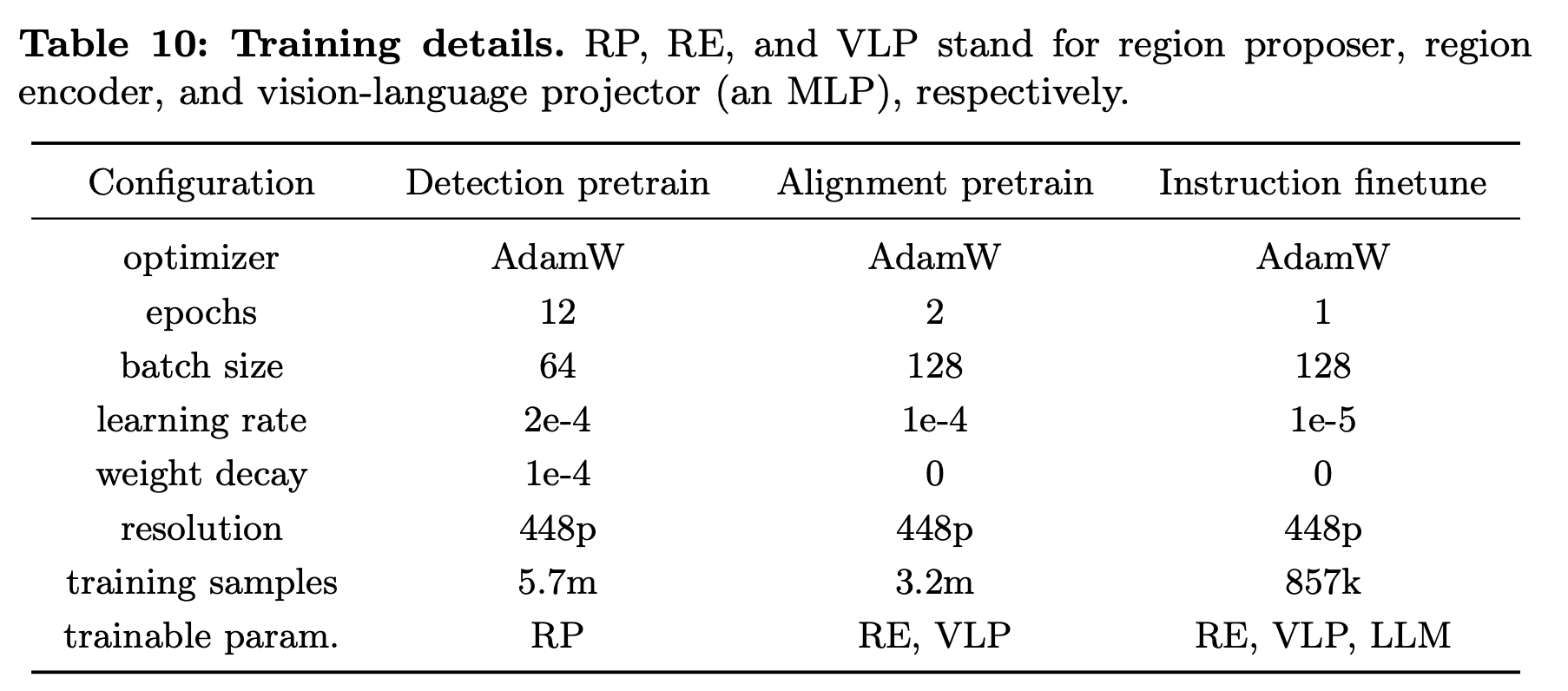
- Detection pretraining: Localization 능력 함양 (A100-8대 기준 5일 소요)
- Image encoder + Region Proposer만 학습 (나머진 freeze)
- Text-Image Alignment pretraining (image-level + region-level) (A100-8대 기준 2.5일 소요)
- MLP projection layer + region encoder만 학습 (나머진 freeze)
- Instruction Finetuning (A100-8대 기준 0.5일 소요)
- Full-finetuning
- Detection pretraining: Localization 능력 함양 (A100-8대 기준 5일 소요)
-
Dataset
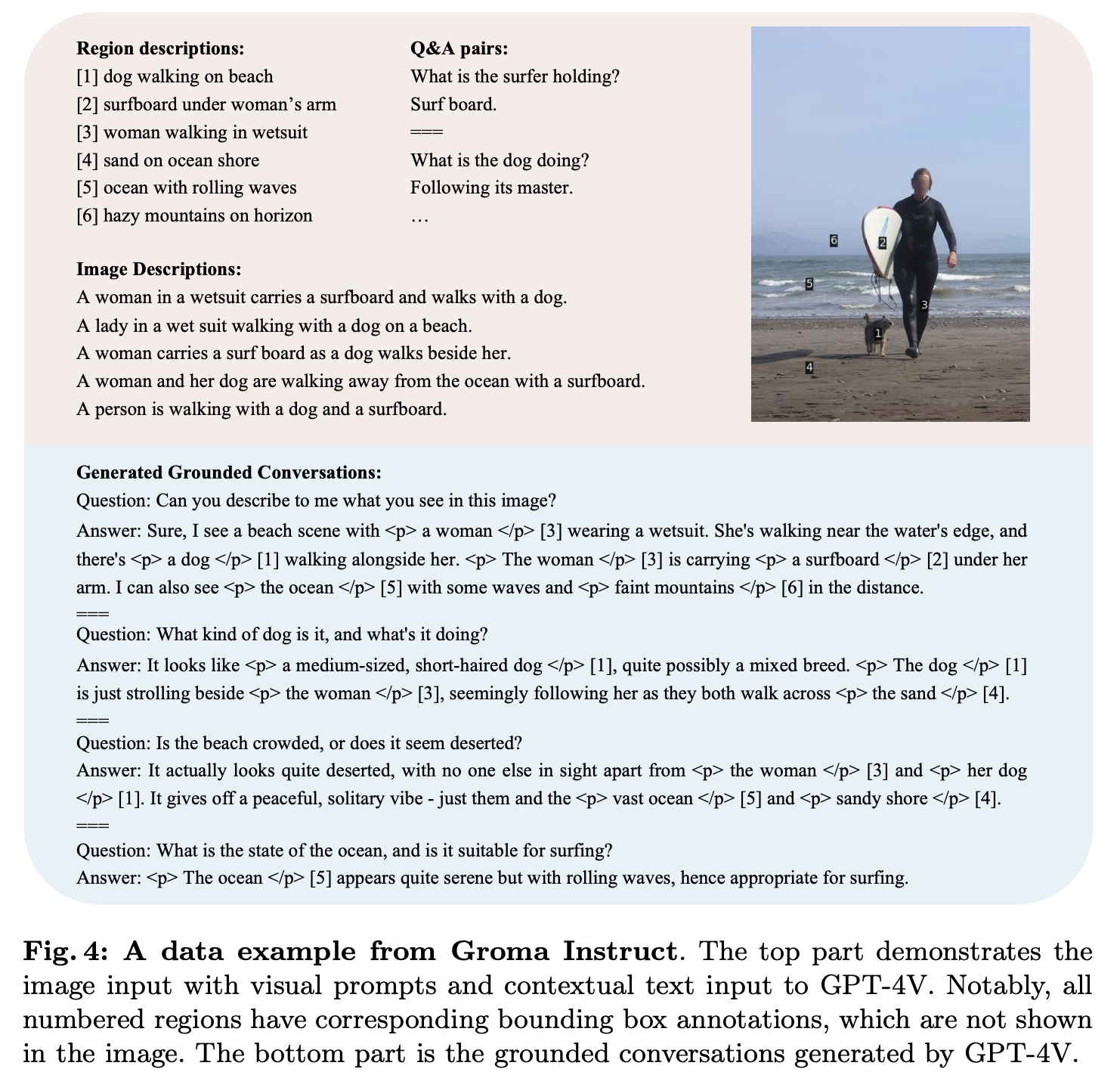
3.4 GPT-assisted Grounded Conversation Generation
-
SFT stage에서 사용할 Groma Instruct 데이터셋 확보를 위해 ChatGPT-4V를 활용
-
목적: fine-granied visual grounding dataset 확보 (Visual Genome 데이터셋 활용)
-
방법
- highly overlap bbox는 제외 (3-10 RoIs/image) + Numeric marker를 사용하여 이미지에 표시
- Rich region description 추가 (image-based Q&A, image description, textual context)
- Few-shot 으로 manually desgined grounded chat을 제공
-
4. Experiments
- Region proposer: 6개의 encoder + 6개의 decoder로 구성
- mixed query selection + look-forward-twice 적용하여 학습 속도 향상
- Top-100 region 예측
-
정량적 결과
-
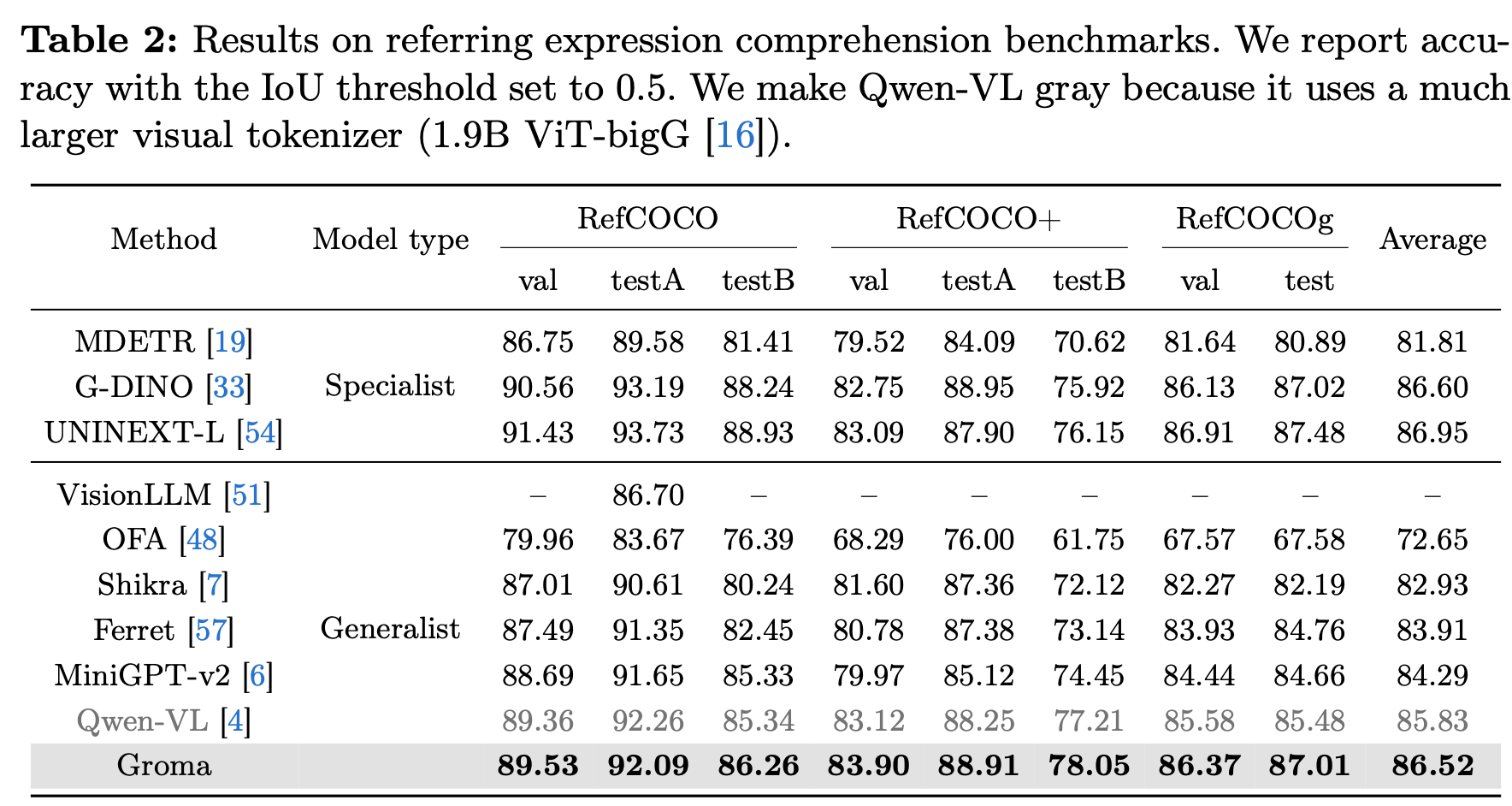
Grounding Benchmarks
-
Wen-VL보다 작은 grounding 데이터셋 (10x), 작은 visual tokenizer (1.9B vs 0.3B(?))을 가지고 비슷한 성능
-
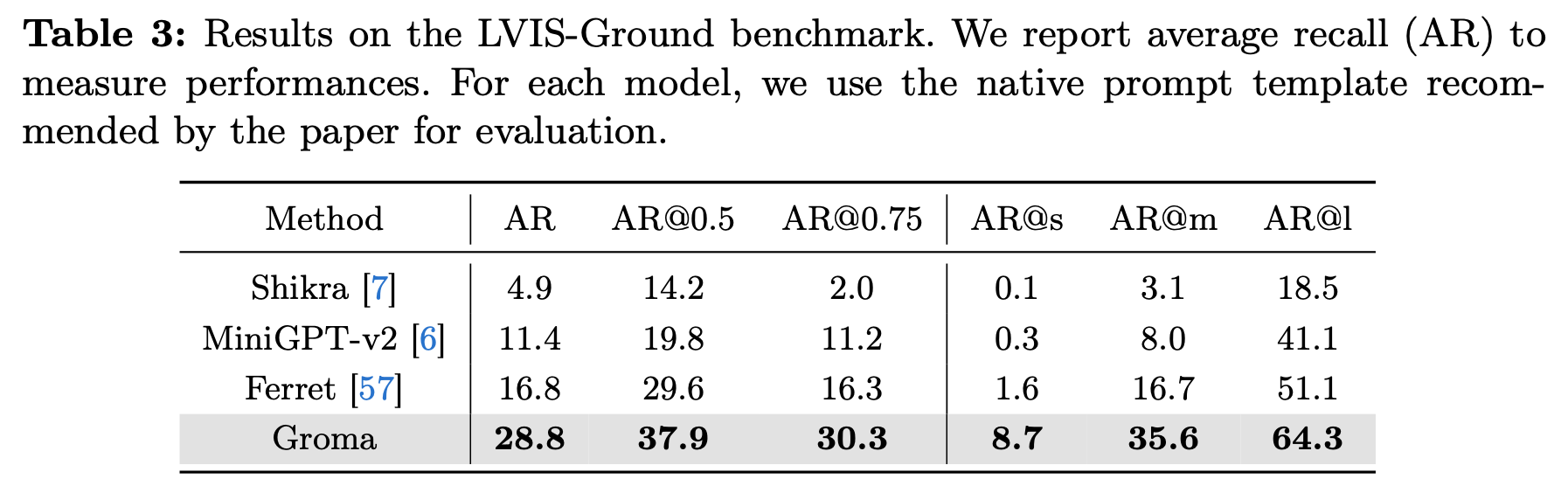
REC는 협소한 object grounding에 대해서만 평가해서 LVIS-Ground로도 평가를 진행
-
-
Referring Benchmarks: fine-grained region understanding 능력 평가

-
Conversational VQA Benchmarks
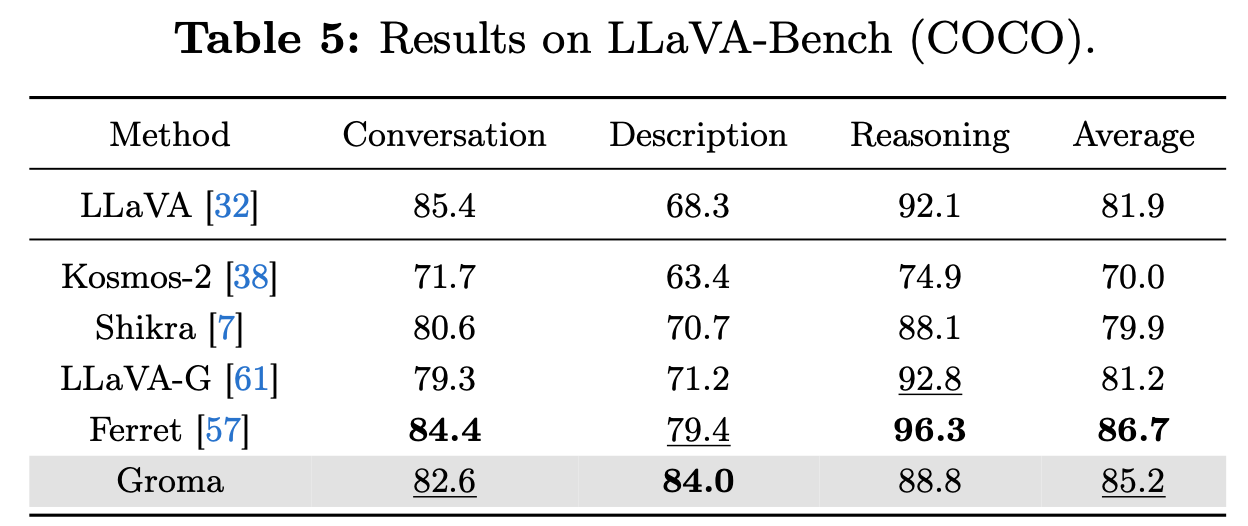
- Image-level Understanding에도 준수한 성능
- 다만 Ferret보다 Conversation & Reasoning에서 안좋은건 DiNOV2가 Clip보다 image understanding에서 떨어지기 때문
- Scale-up pretraining하면 해결될 걸로 예상
- Image-level Understanding에도 준수한 성능
-
-
정성적 결과
-
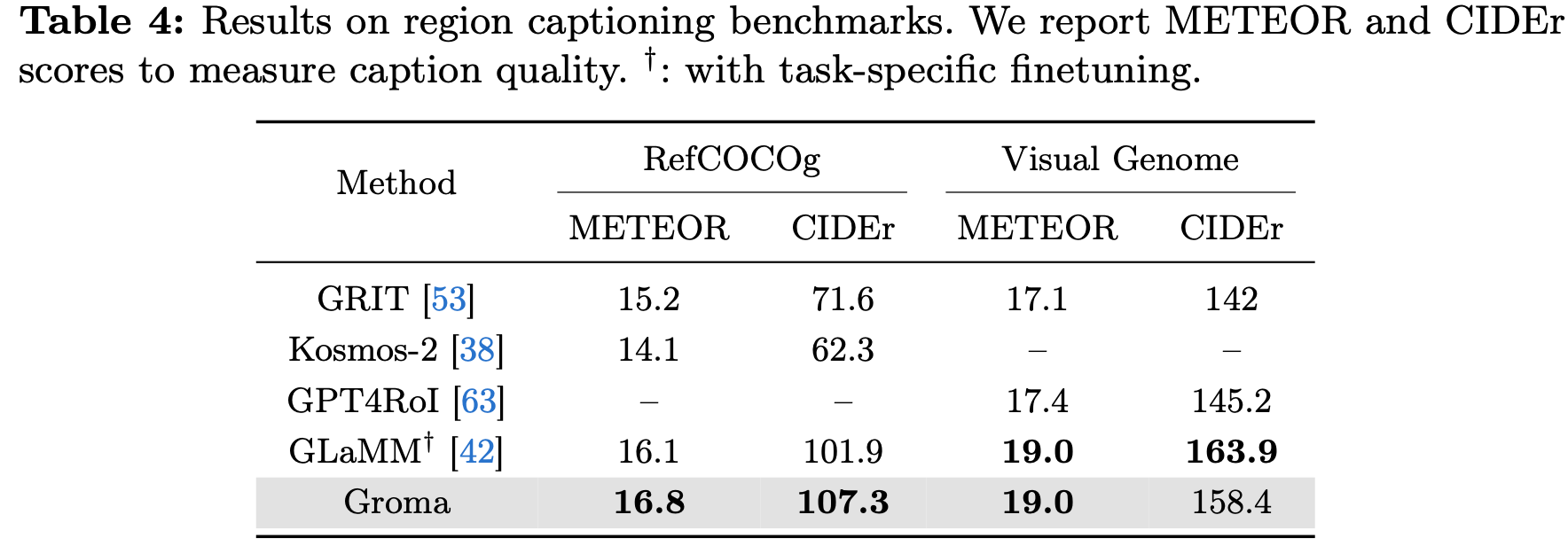
Grounded Image Captioning Task
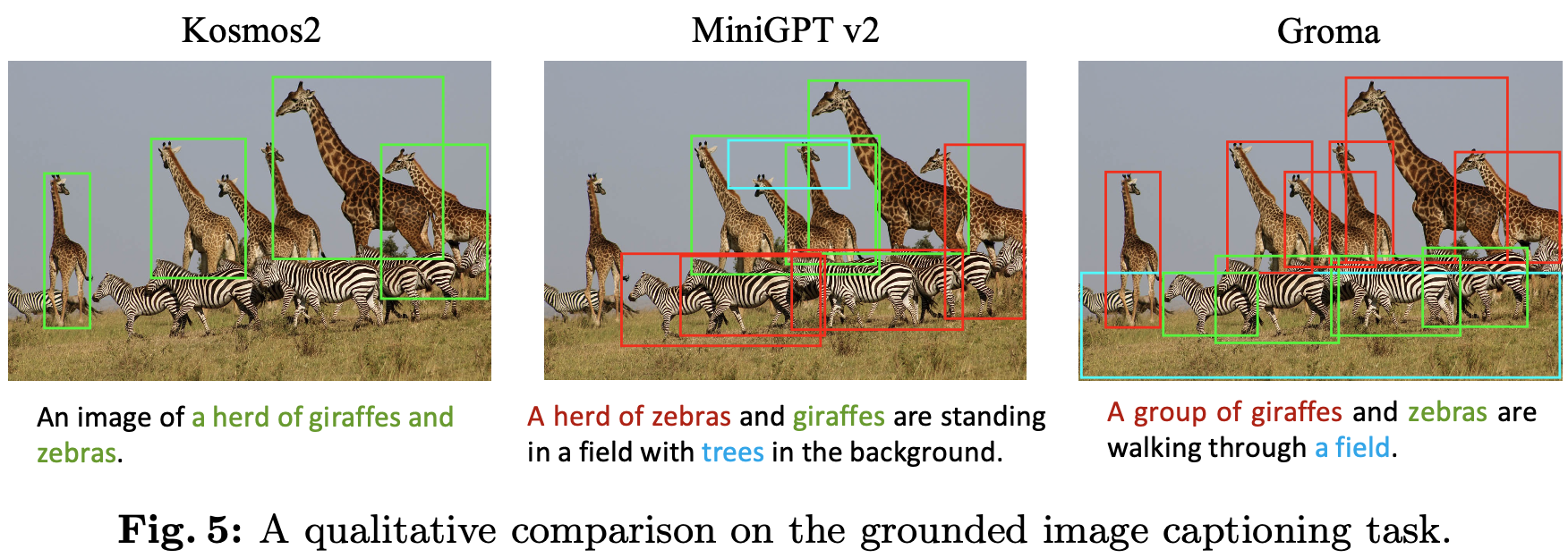
-
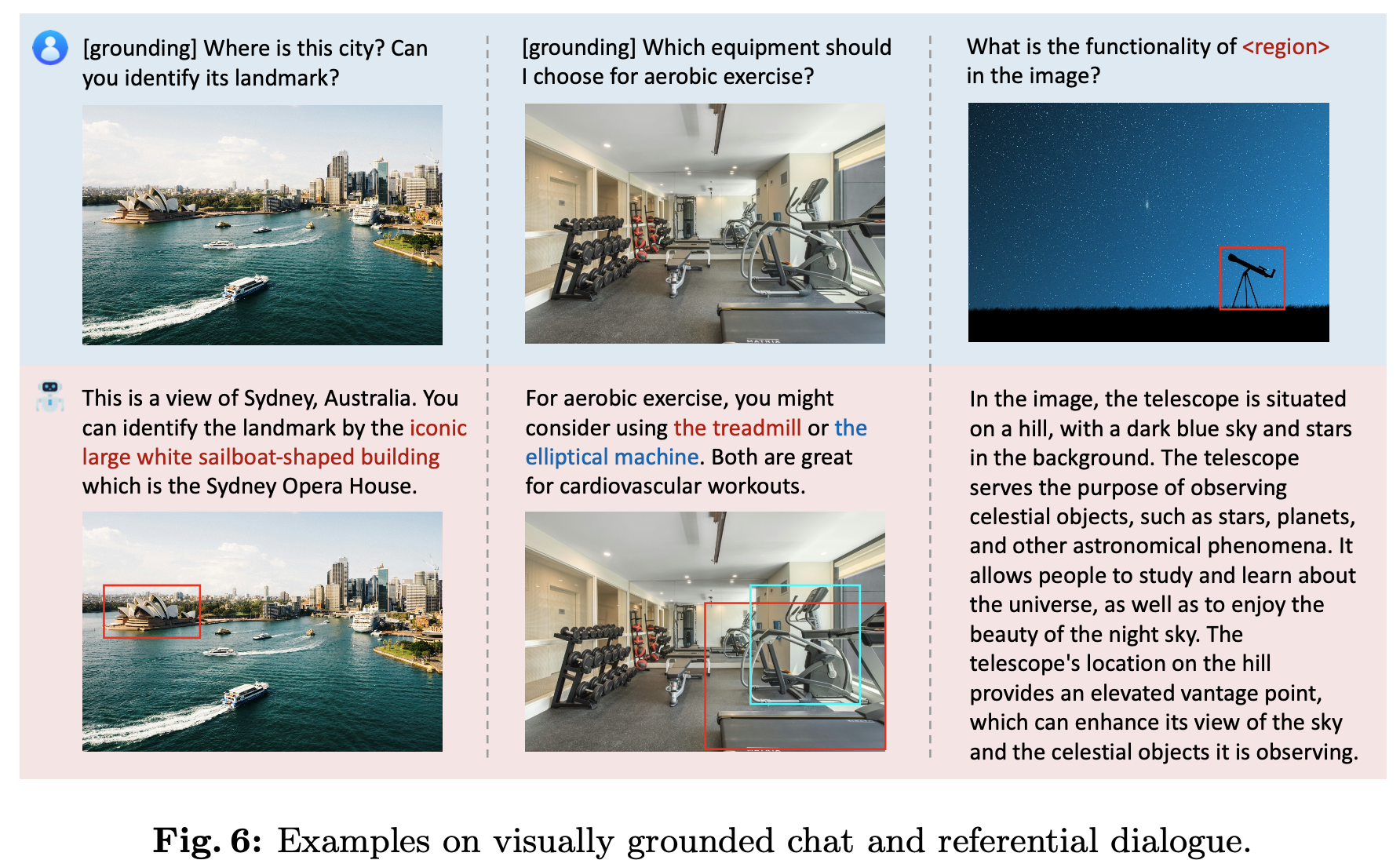
Grounded Chat & Referential Dialog
-
-
Ablation Studies
-
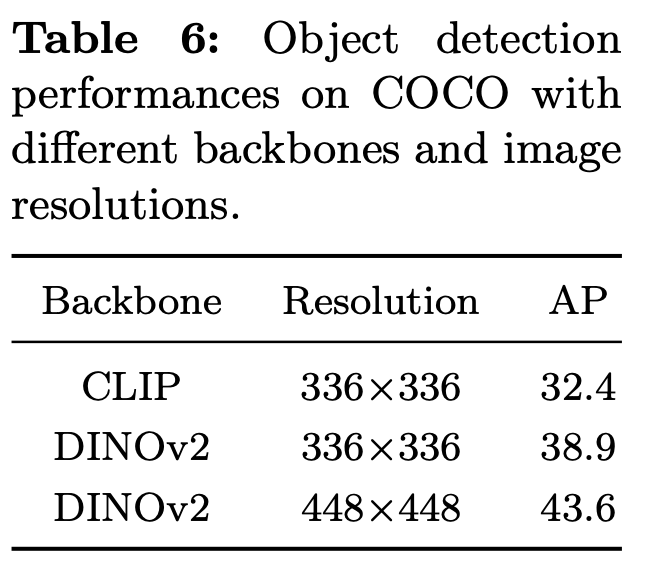
Clip vs DINOv2: RoIs Detection 성능이 DINOv2가 뛰어나서 이를 채택
-
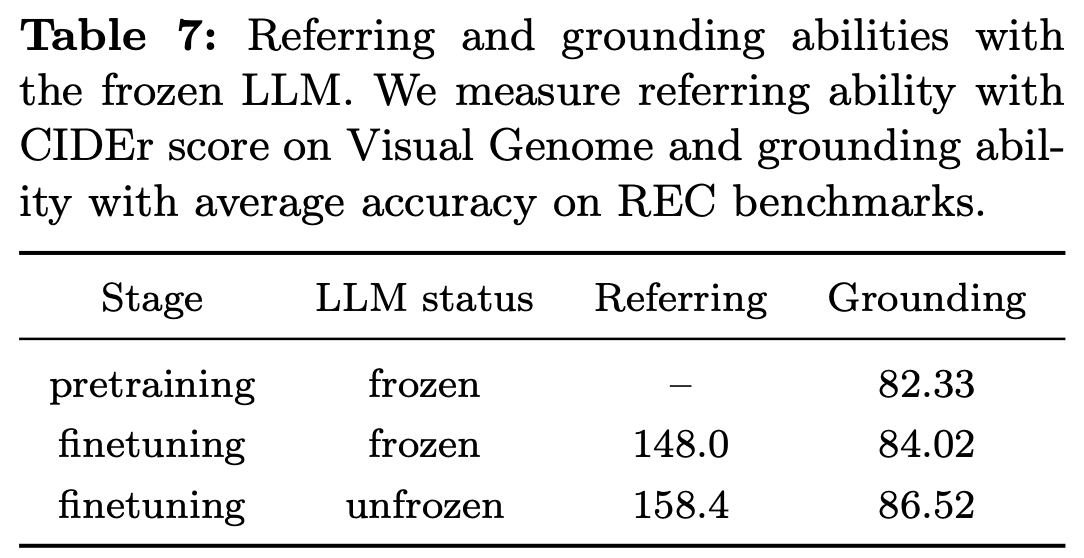
Frozen vs UnFrozen LLMs @ SFT
-
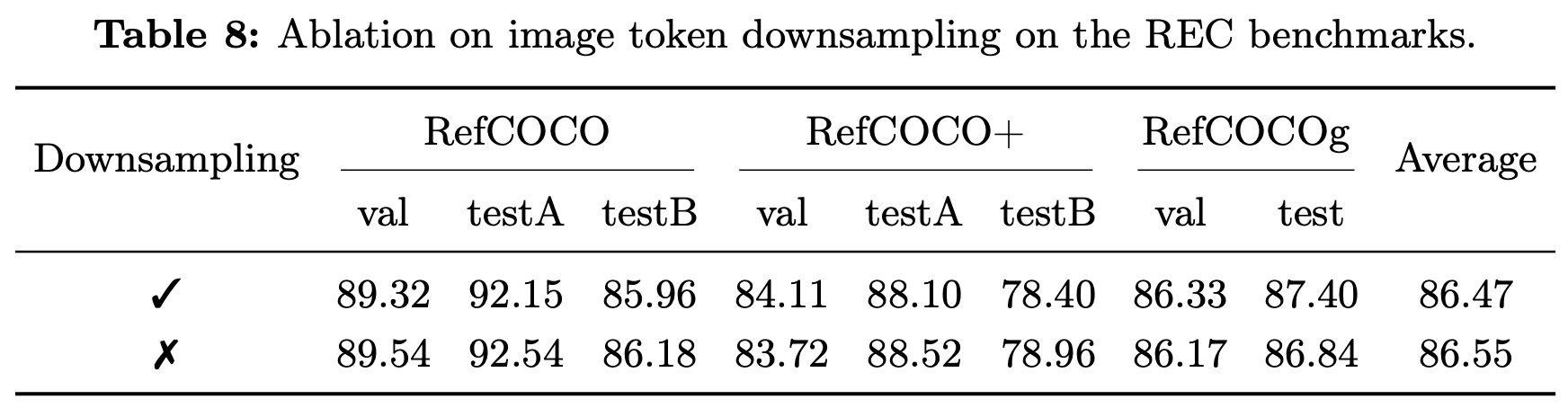
(Image) Token Merge
-
성능은 거의 보존되면서 visual token은 1/4
-
-