[MM] Cobra: Extending Mamba to Multi-Modal Large Language Model for Efficient Inference
[MM] Cobra: Extending Mamba to Multi-Modal Large Language Model for Efficient Inference
- paper: https://arxiv.org/pdf/2403.14520
- github: https://github.com/h-zhao1997/cobra
- Archived (인용수: 21회, 2024-08-21 기준)
- downstream task: VQA
1. Motivation
-
MLLM의 근간이 되는 LLM은 전부 quadratic computation cost를 유발하는 Transformer 구조로 되어있음 $\to$ 계산량이 많이 요구됨
-
Linear computation cost만 요구하는 Mamba 기반의 LM에 Visual modality를 추가한 MLLM형태는 어떨까?
2. Contribution
- 기존 MLLM은 모두 Quadratic Compuatational complexity기반의 Transformer로 되어 있음을 발견하고, linear computational complexity를 갖는 MLLM 모델인 Cobra를 제안함
- 다양한 VIsion & Language fusion scheme를 실험하고, 최적의 Multimodal 통합 구조를 제안함
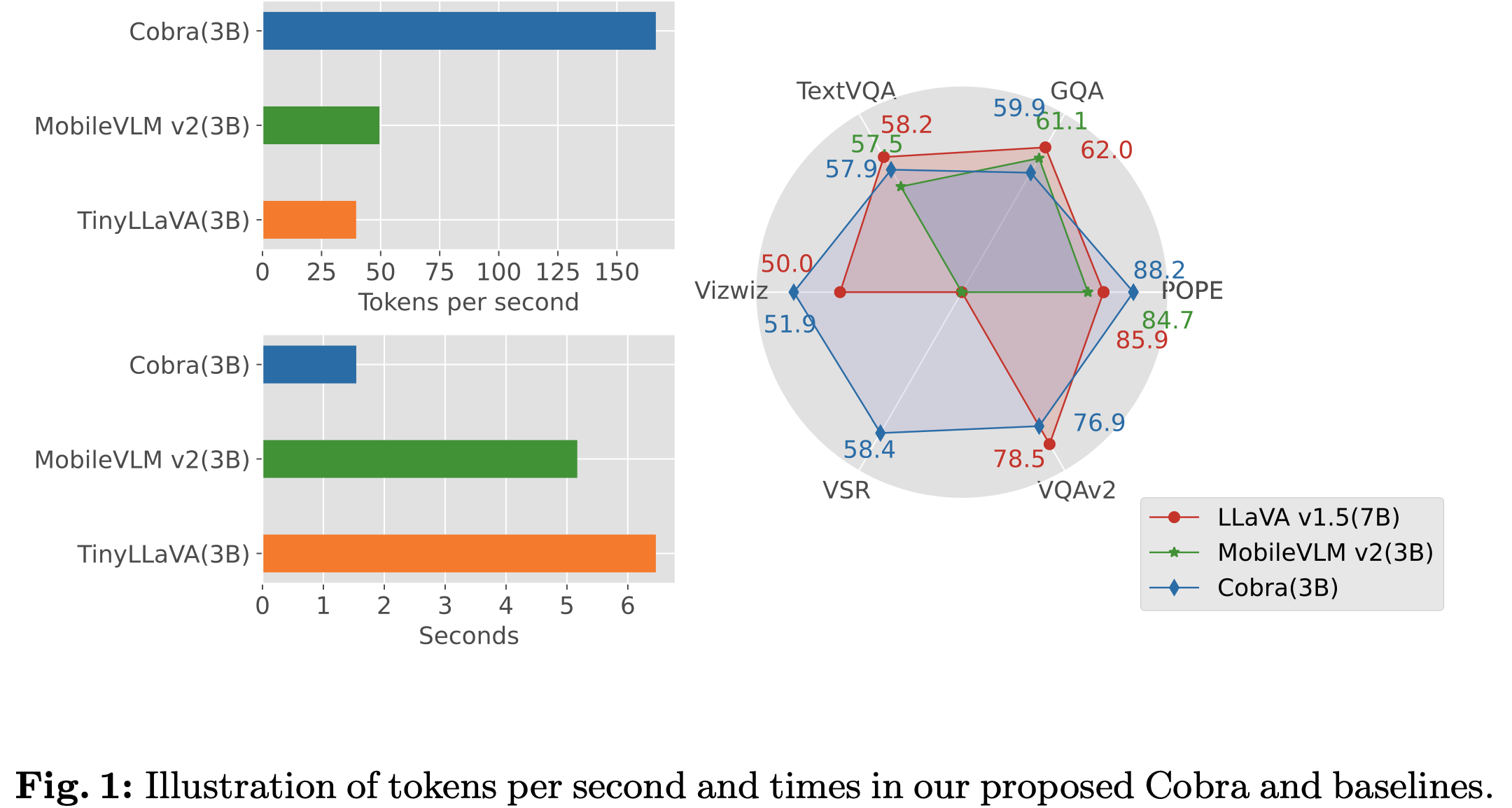
- LLaVa-7B에 비해 43%의 parameter (2.8B)만 가지고 속도는 4~5배 빠른데 유사한 성능의 MLLM 모델을 구현함
3. Cobra
3.1 Preliminaries
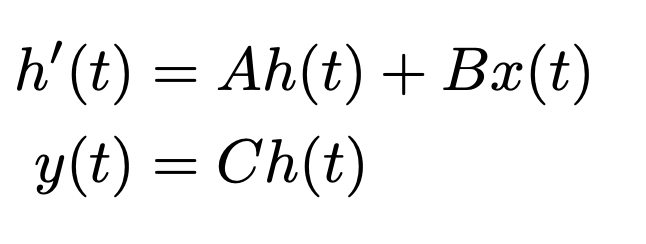
- State-Space Models
-
$A \in \mathbb{R}^{n \times n}$ : state matrix for hidden state
-
$B \in \mathbb{R}^{n \times 1}$: state matrix for input
-
$C \in \mathbb{R}^{1 \times n}$: state matrix for output
-
$x$: scalar input
-
$t$: time step
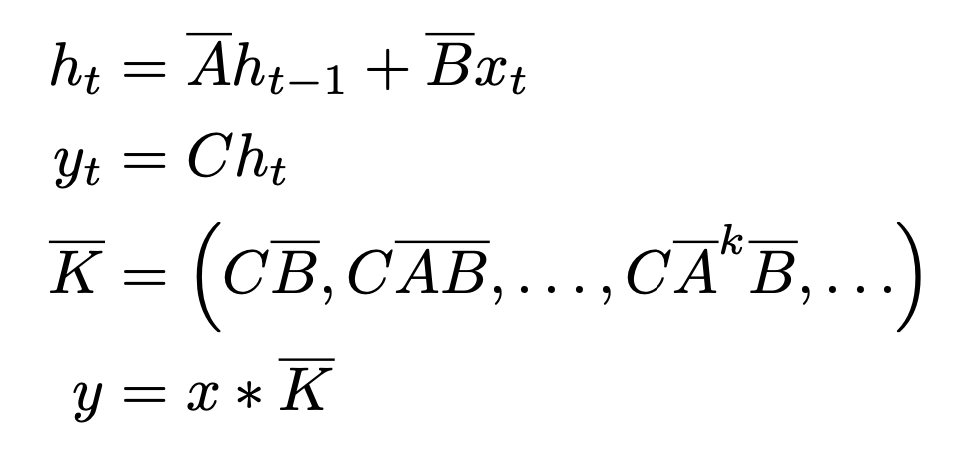
$\to$ discretized form으로 변환
-
Discretization Rule (ZOH: Zero-Order-Hold)
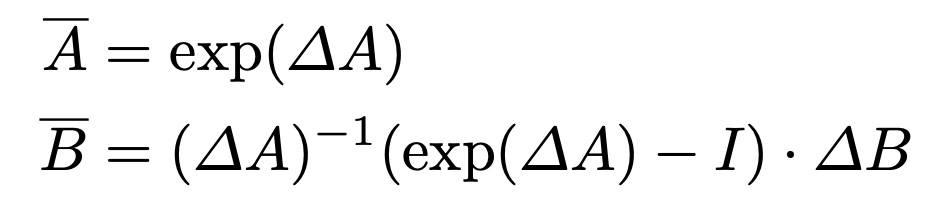
- $\Delta$: Time-scale parameter
3.2 Corbra
-
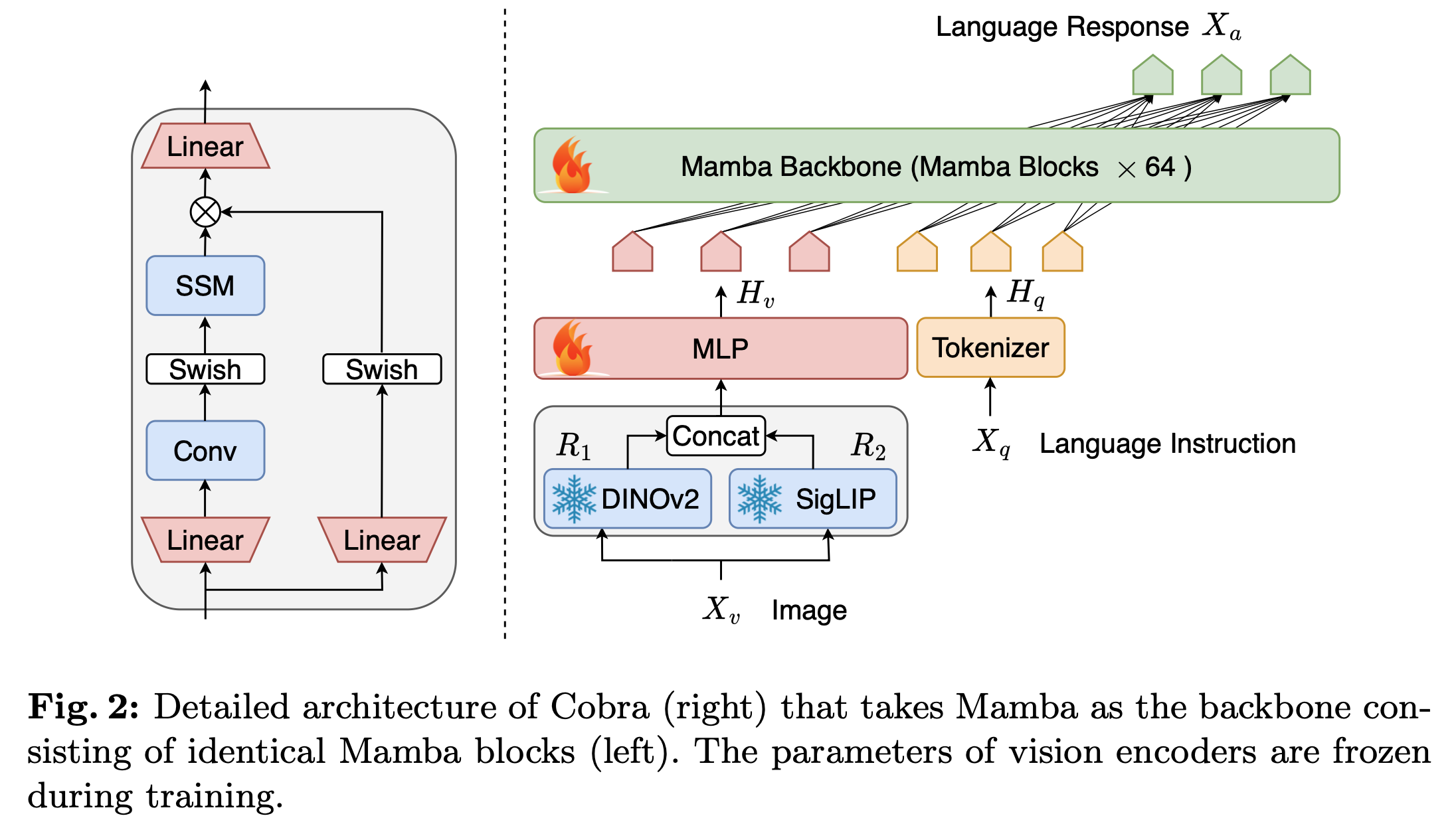
Overall architecture
-
SSM branches
- Convolution branch: Input data의 time-invariant dependecies를 학습
- Swish-only branch: Gate 역할 (propagate/forget)
-
Cobra (MLLM) 구조
-
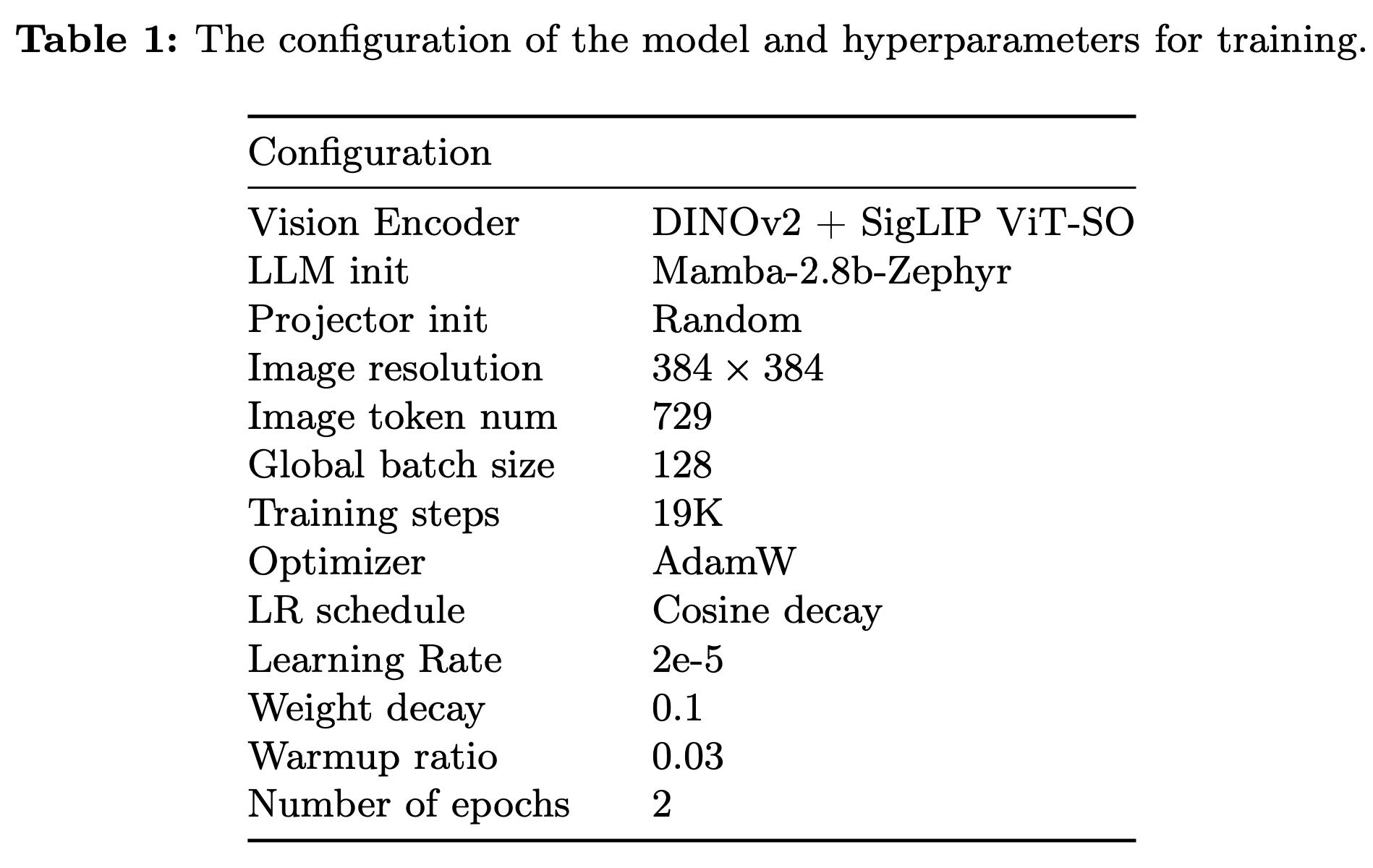
Vision encoder: DINOv2 + SigLIP
-
DINOv2: low-level spatial property를 catch
-
SigLIP: semantic properties를 catch (CLIP-vision의 loss를 Sigmoid loss로 바꾼 형태)
-
Input
- $X_v \in \mathbb{R}^{C \times H \times W}$: input image
- $N_v = HW / P^2$: P는 patch 크기, $N_v$는 patch 갯수
-
Output

- $R_v \in \mathbb{R}^{N_v \times D_v}$
-
-
Projector: vision feature와 text feature를 align하는 형태
-
$\phi$: MLP + downsample projector $\to$ [10] MobileVLM 논문 참고
- Input: Vision encoder의 output feature
- Output: Language token이 embedding된 latent 공간에 mapping된 Visual token
-
-
Mamba backbone (LLM)
-
Text token과 Projector의 visual token을 입력으로 받아 target token을 autoregressive하게 생성하는 모듈
-
64개의 basic block + residual connection + RMSNorm으로 구성
-
-
-
3.3 Training Recipe
-
Dataset
-
Mixed dataset
- LLaVA 1.5에서 사용한 academic VQA : 655K image, dialog pair (multi-turn conversations)
- LLaVA-Instruct에서 사용한 Visual instruction Tuning data
- ShareGPT에서 사용한 Pure-text instruction tuning data
-
LVIS-Instruct-4V: 220K image에 대해 GPT-4V로 instruction을 생성한 데이터셋
-
LRV-Instruct: 400K의 visual instruction dataset (16개의 VLM task를 다룸)
$\to$ 1.2M image와 conversation으로 학습
-
-
학습 스케줄
-
SigLIP ViT-SO: Shape-Optimized version의 SigLiP ViT
-
LLM
-
pretrained: SlimPajama dataset (627B token)
-
fintuned: Ultrachat-200k dataset + Ultrafeedback-binarized dataset
$\to$ 우리의 task에 맞는 initial weight로 intialize 필요!
-
-
LLaVA와 다르게 2 epoch로 학습 (LLaVa finetuning은 1 epoch)
- A100 80GB x 8대로 26.5h 학습
-
4. Experiments
-
성능
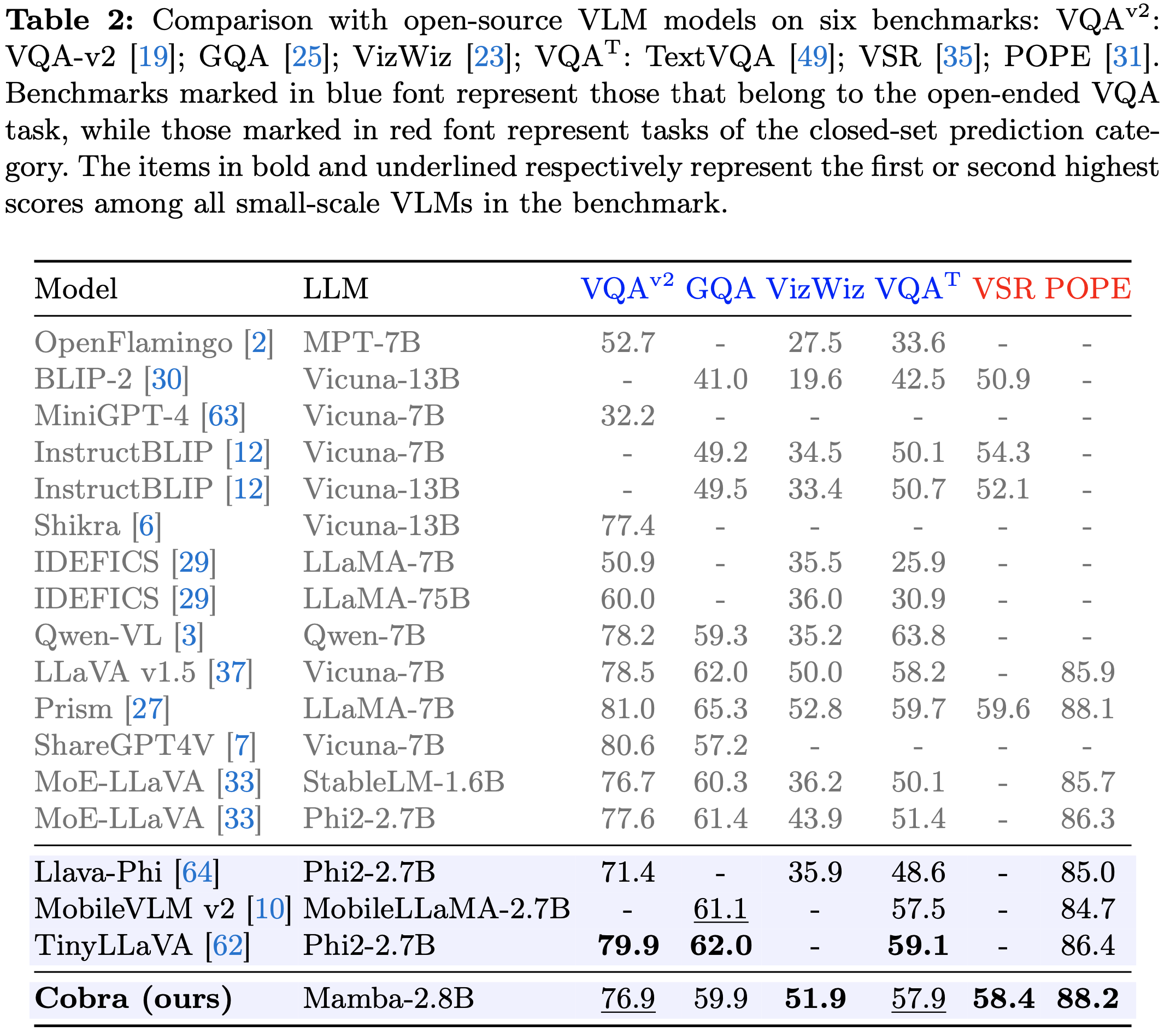
- 동일 크기 Transformer구조 LLM보다는 성능 우위. 약 2배 큰 LLaVa v1.5-7B와는 준하는 성능
-
속도
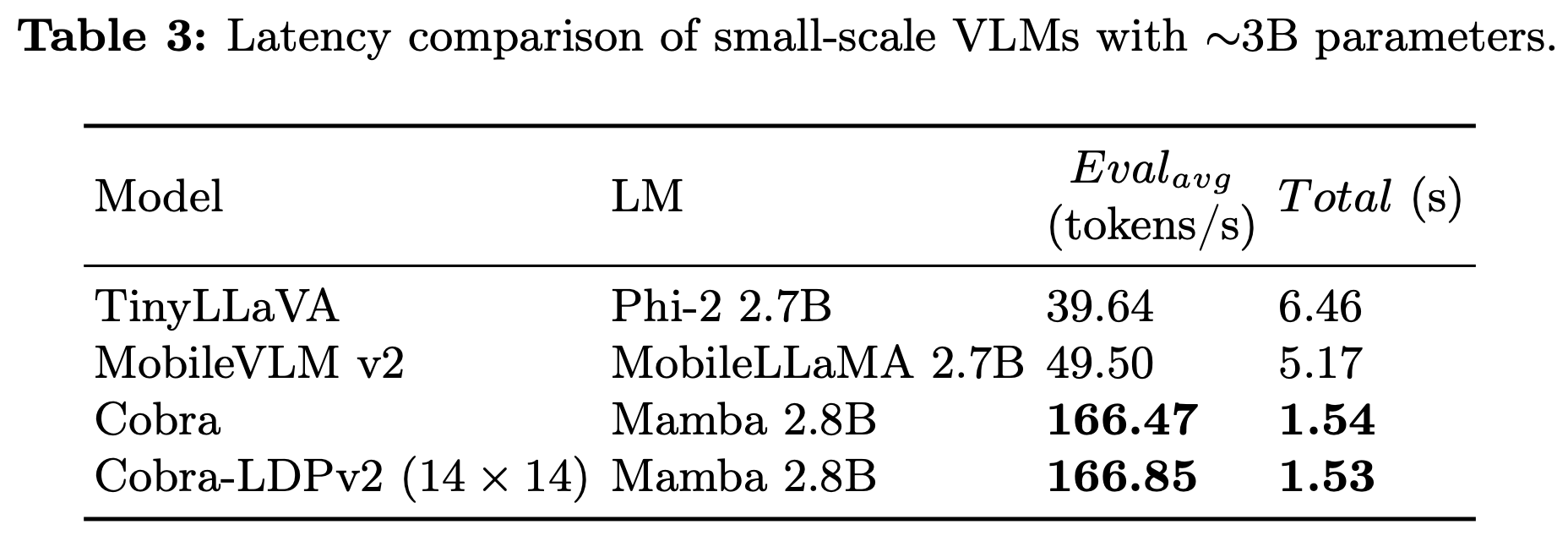
- 동일 크기 Transformer 구조보다 약 4배 빠름 $\to$ visual token갯수가 더 많아졌음 (576 vs. 729) 에도 빨라진 것은, SSMs 구조 특성상 query 갯수의 linear하게 computation이 증가하기 때문
- A100 PCIe 80GB GPU에서 측정한 결과
- Visual token 갯수를 256으로 줄인 버전 (Cobra-LDPv2)와 속도 차이가 크지 않음 $\to$ SMMs 구조가 병렬 처리되는 RNN model과 동일하므로, prompt token의 갯수가 초기 forward process만 속도에 영향을 미치기 때문으로 사료됨
- Memory usage: Transformer 구조 특성상 KV Cache만큼 memory 요구하는데 비해, SSMs은 constant-sized hidden state만 유지하므로 prompt token 갯수와 무관함 $\to$ 더 큰 dimension의 projector로 차용 가능할 듯
-
Ablation studies
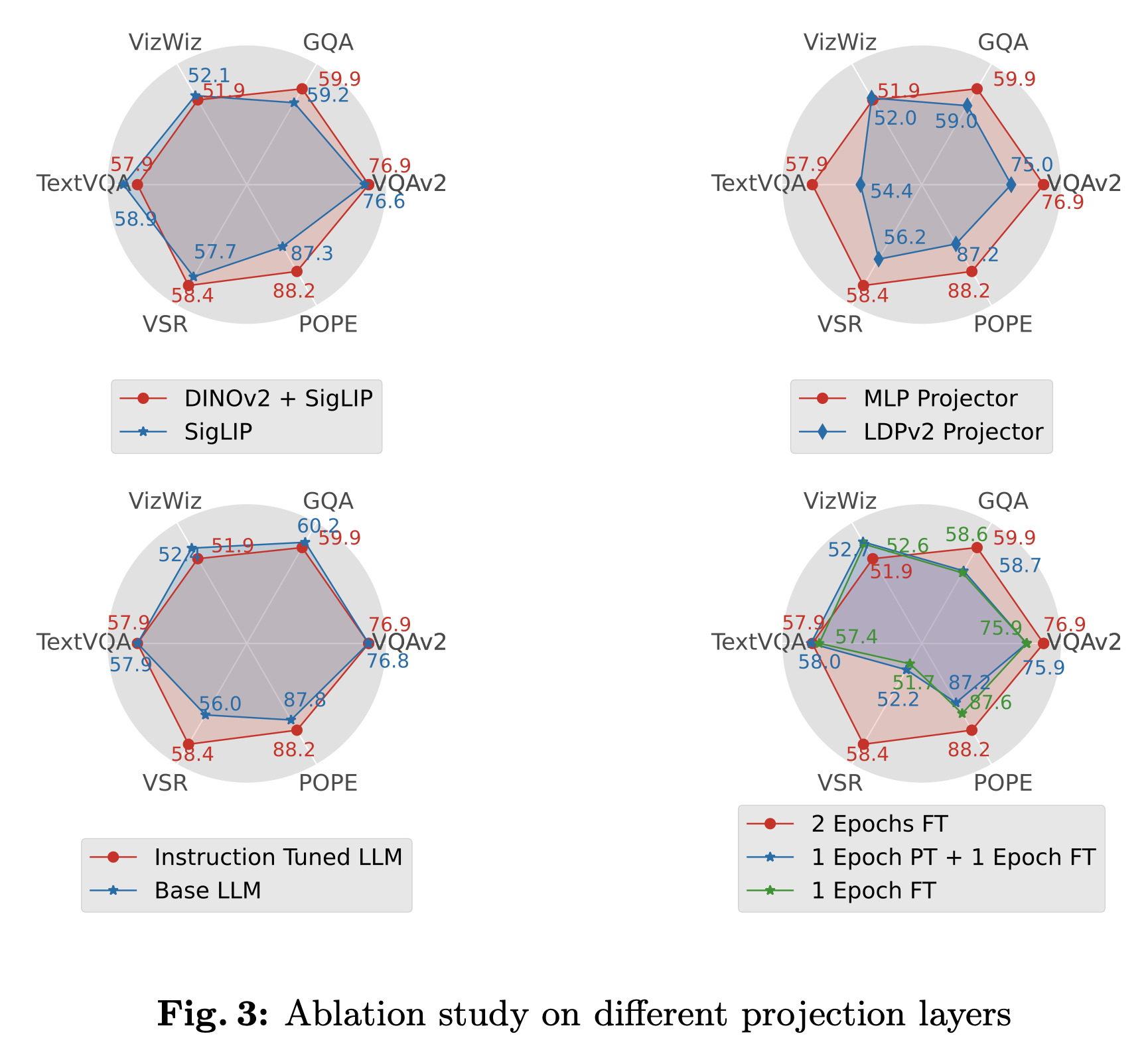
- Visual Encoder
- SigLIP만 쓴것보다 SigLIP+DINO-v2를 사용한게 대체로 우수
- 단, semantic meaning을 강조하는 VQA tasks (VIZWIZ, TaskVQA)는 미세하게 악영향을 주는것을 볼 수 있음 $\to$ downstream task에 따라 vision encoder 결정 필요
- SigLIP만 쓴것보다 SigLIP+DINO-v2를 사용한게 대체로 우수
- Projector
- MLP vs. LDPv2 projector
- LDPv2처럼 token을 줄이면 (compress) 성능이 매우 안좋아짐
- MLP vs. LDPv2 projector
- Language Model
- No finetuned LLM (Base LLM) vs. Instruction Tuned LLM: 엎치락 뒤치락.. 큰 영향 없음
- Training Strategies
- Pretraining stage 중요성: 없음 (Blue vs. Greed)
- Epoch의 중요성: 엎치락 뒤치락.. (dataset마다 다름)
- Visual Encoder
-
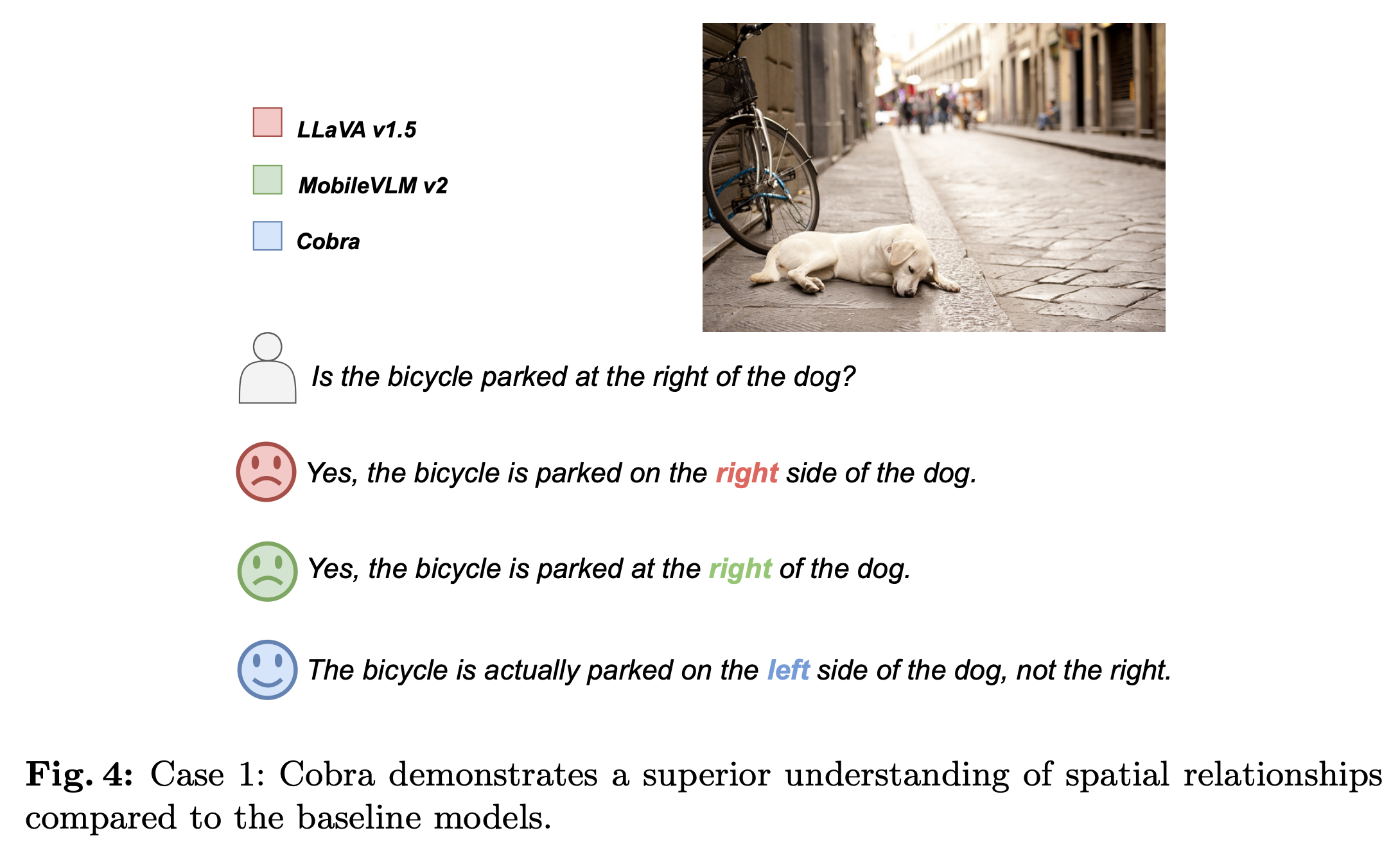
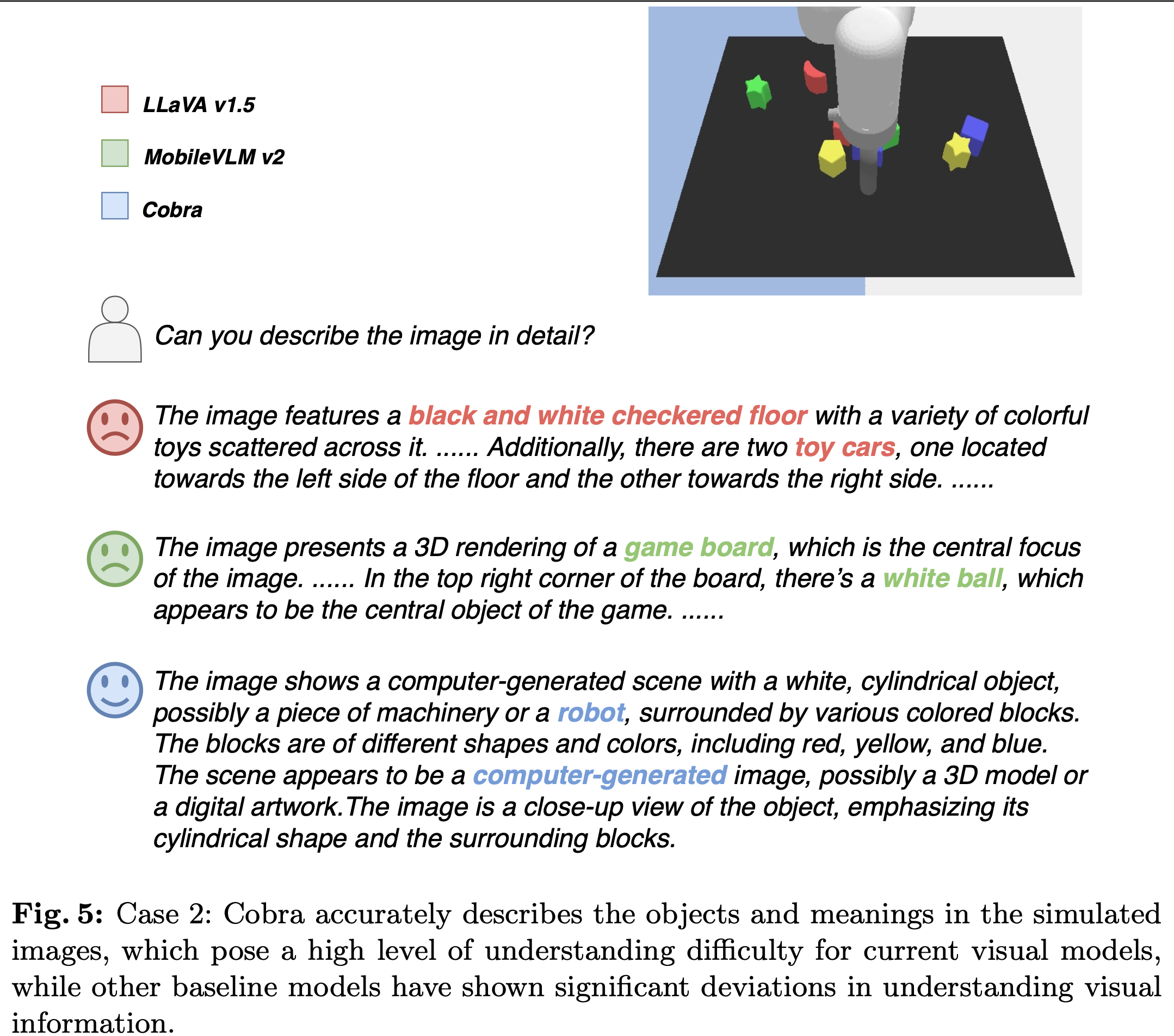
Case study
-
Spatial Relation
-
Compute-Generated Graphic을 잘 묘사
-
-
Limitations
- Pretrained dataset이 Tranformer 기반보다 부족함
- Numerical precision에 민감하여, fp16이하로 quantized할 수 없음